Da en ubåd kan angribe, mens den er skjult under vandet, har den brug for en unik løsning til at spore sin fjende, og det er her, ubådsperiskopet kommer ind i billedet. De tidlige designs af ubådsperiskopet, der blev brugt under 2. verdenskrig, var meget enkle ved i bund og grund at have to teleskoper, der pegede mod hinanden.
Den måske største forskel mellem en ubåd og et krigsskib på overfladen er den foretrukne angrebsmetode. Under Anden Verdenskrig var overfladeskibe designet til at skyde med tunge kaliberkanoner. Destroyere havde også torpedoer med, som normalt blev affyret i en vinkel på 90° i forhold til destroyerens kurs. Luftfartøjer brugte fly og bomber på stort set samme måde, som slagskibe og krydsere brugte deres kanoner, dog naturligvis med betydeligt større rækkevidde og kraft.
Undervandsbåde angreb generelt, mens de var under vandet. Ubåde er normalt mere sårbare over for skader end krigsskibe på overfladen. Hvis der er nogen form for panser på en ubåd, er det for det meste installeret omkring kommandotårnet og broen og designet til beskyttelse mod lette kalibervåben, såsom maskingeværer, eller mod granatsplinter. Overfladekrigsskibe har generelt en mere omfattende panserbeskyttelse. For ubåden kommer den primære beskyttelse ikke fra tunge stålplader, men fra at kunne operere under overfladen, hvor fjenden ikke kan finde den at skyde på.
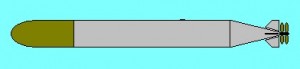
En militær ubåds hovedvåben er torpedoen. Under Anden Verdenskrig var den mest almindelige type en 21-tommers (533 mm) torpedo, der blev drevet af enten en lille “damp”-turbine eller af elmotorer og batterier. De elektriske torpedoer blev ofte kaldt “wakeless”, da de ikke efterlod det synlige spor af udstødningsbobler, som var karakteristisk for damptorpedoerne. Den japanske kejserlige flåde havde en 24-tommer (610 mm) “ilt”-torpedo. Denne “Long Lance”-torpedo, som bar et sprænghoved på 1.000 pund – næsten dobbelt så kraftig som andre flåders torpedoer – er generelt blevet anerkendt som den mest effektive torpedo, der nogensinde er blevet bygget med hensyn til anvendelighed som skibsdræber.
 For at en neddykket flådeubåd kunne sænke et fjendtligt skib, var det nødvendigt med en eller anden måde at sigte torpedoerne på. Forskellige flåder udviklede forskellige metodologier. I mellemkrigstiden favoriserede den amerikanske doktrin brugen af sonar til at bestemme målets afstand, pejling og vinkel. Man mente, at fremskridtene inden for detektion og våben til ubådsbekæmpelse havde gjort det selvmorderisk at udstille et periskop i dagslys. Til dette formål installerede den amerikanske flåde meget avancerede sonar- og hydrofonsæt i sine flådeubåde sammen med torpedodatacomputere, der forblev betydeligt mere avancerede end noget, der blev brugt i nogen anden flåde, indtil længe efter at krigen var slut.
For at en neddykket flådeubåd kunne sænke et fjendtligt skib, var det nødvendigt med en eller anden måde at sigte torpedoerne på. Forskellige flåder udviklede forskellige metodologier. I mellemkrigstiden favoriserede den amerikanske doktrin brugen af sonar til at bestemme målets afstand, pejling og vinkel. Man mente, at fremskridtene inden for detektion og våben til ubådsbekæmpelse havde gjort det selvmorderisk at udstille et periskop i dagslys. Til dette formål installerede den amerikanske flåde meget avancerede sonar- og hydrofonsæt i sine flådeubåde sammen med torpedodatacomputere, der forblev betydeligt mere avancerede end noget, der blev brugt i nogen anden flåde, indtil længe efter at krigen var slut.
Samtidig viste det sig faktisk, at sonarangreb under nedsænkning var bemærkelsesværdigt ineffektive under faktiske krigsforhold. I en af de mest almindelige militære fejlslutninger udviklede den amerikanske flåde en teori og så derefter testresultaterne gennem denne teoris briller. Alle resultater, der syntes at understøtte teorien, blev ivrigt taget til efterretning, mens resultater, der ikke understøttede teorien, blev henført til “operatørfejl”. Denne tendens fortsatte langt ind i krigen i en sådan grad, at en række kommandanter blev afløst på grund af “manglende aggressivitet”, når det egentlige problem var, at de torpedoer, de affyrede, ikke virkede. (Bureau of Ordinance sagde, at torpedoerne virkede, og da de umuligt kunne tage fejl i den henseende, måtte det være kommandanterne.)
Mens de amerikanske overordnede kommandanter fortsatte med at overse torpedoproblemerne i nogen tid, blev det nedsænkede sonarangreb meget hurtigt elimineret, da krigen først begyndte. Skipperne 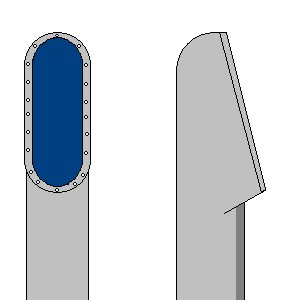 erkendte to kendsgerninger. For det første ramte de ikke noget med Sonar alene. Og for det andet, så længe man var forsigtig, var det meget sværere at se angrebs-periskopets hoved, end teoretikerne troede. Den øverste del af den optroniske mast blev lavet så slank som muligt for at mindske muligheden for at observere den. De begrænsende faktorer var størrelsen af den øverste linse, som skulle være stor nok til at sikre en anstændig drift i dagslys, og det øverste prisme og dets justeringsmekanisme. Det øverste prisme kunne vippes fra kommandotårnet, så synsfeltet kunne hæves til luftsøgning, eller trykkes ned for at se tæt på.
erkendte to kendsgerninger. For det første ramte de ikke noget med Sonar alene. Og for det andet, så længe man var forsigtig, var det meget sværere at se angrebs-periskopets hoved, end teoretikerne troede. Den øverste del af den optroniske mast blev lavet så slank som muligt for at mindske muligheden for at observere den. De begrænsende faktorer var størrelsen af den øverste linse, som skulle være stor nok til at sikre en anstændig drift i dagslys, og det øverste prisme og dets justeringsmekanisme. Det øverste prisme kunne vippes fra kommandotårnet, så synsfeltet kunne hæves til luftsøgning, eller trykkes ned for at se tæt på.
Hvis periskopkonstruktøren – og den flåde, der ansatte ham – var villig til at give afkald på muligheden for luftsøgning og bygge et periskop med et fast hoved, kunne diameteren være ganske lille. I nogle tilfælde ikke meget mere end 1/2 tomme. Standard-angrebsperiskopet, der blev brugt i amerikanske flådeubåde, var 1-1/4 tommer i diameter i den øverste ende. Søgperiskoper eller “natperiskoper” har et større hoved for at øge lysindsamlingskapaciteten. Amerikanske eftersøgningsperiskoper fra slutningen af krigen havde en radarbølgeledning i hovedet.
Et almindeligt udtryk er periskopdybde, som defineres som den dybde, der er nødvendig for at udvide periskopet over vandoverfladen.
Periskopbetjening
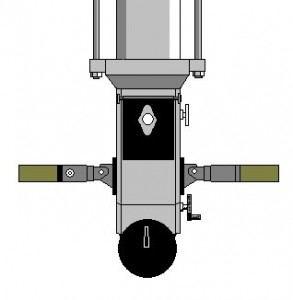 Billedet til venstre viser en forenklet visning af okularet og betjeningselementerne på et Kollmorgen-angrebsperiskop, svarende til den type, der blev brugt i de fleste amerikanske flådeangrebsperiskop-ubåde under Anden Verdenskrig. Periskopets hovedaksel hviler på kuglelejer i den tunge løftekrave i toppen. De to løftestænger, der er fastgjort til kraven, går ind i hydrauliske cylindre, der er placeret i periskopskjoldene over kommandotårnet. For at hæve periskopet påføres hydraulisk tryk på bunden af stemplerne i cylinderne. For at sænke periskopet kan den hydrauliske væske løbe ud af cylinderne og tilbage i reservoiret. Tyngdekraften sænker periskopet, når det hydrauliske tryk frigøres.
Billedet til venstre viser en forenklet visning af okularet og betjeningselementerne på et Kollmorgen-angrebsperiskop, svarende til den type, der blev brugt i de fleste amerikanske flådeangrebsperiskop-ubåde under Anden Verdenskrig. Periskopets hovedaksel hviler på kuglelejer i den tunge løftekrave i toppen. De to løftestænger, der er fastgjort til kraven, går ind i hydrauliske cylindre, der er placeret i periskopskjoldene over kommandotårnet. For at hæve periskopet påføres hydraulisk tryk på bunden af stemplerne i cylinderne. For at sænke periskopet kan den hydrauliske væske løbe ud af cylinderne og tilbage i reservoiret. Tyngdekraften sænker periskopet, når det hydrauliske tryk frigøres.
Knappen øverst til højre på periskopet bruges til at justere fokus. Den sorte plade, med okularet i den øverste halvdel, er strålefiltreringsenheden. Denne indeholder en skive med tre farvede – og et klart – filter, som kan drejes foran okularet for at lette synligheden under forskellige lysforhold. Filtrene er røde, grønne og gule i farven. Når periskopet er i brug, er der monteret et dobbelt gummiokular. Den ene side af okularet er blokeret, og der bruges faktisk kun ét øje. Okularet er vendbart, således at kaptajnen kan bruge sit dominerende øje. (Ud over at være højre- eller venstrehåndede er folk også højre- eller venstreøjede, selv om de fleste nok ikke aner hvilket.)
Den yderste del af det venstre håndtag roterer, så det øverste prisme kan hæves eller sænkes ned. Knappen på den inderste del af håndtaget er en spærre. Dette gør det muligt for det roterende håndtag at klikke ind i forudindstillede positioner, således at kaptajnen ved at starte med prismaet i fuld elevation og bevæge sig til den næste detention ved afslutningen af et fuldt sving over horisonten kan sænke prismaet til den næste position ved at føle efter. Tre fuldstændige fejninger dækker alle positioner.
Det højre håndtag justerer den optiske styrke af periskopet, som også optisk set er et teleskop. Den lave indstilling er 1,5 effekt, og den høje indstilling er 6 effekt.
Knappen under det højre håndtag er stadimeterkontrollen. Stadimeteret er en afstandsbestemmelsesanordning, som gør det muligt for kaptajnen at planlægge sit angreb med langt større nøjagtighed end blot at forsøge at gætte, hvor langt væk målet er placeret. Afstanden til målet, i yards, aflæses fra den store sorte skive nederst på periskopet. Denne urskive er kopieret på bagsiden af periskopet, således at aflæsningen også kan foretages af indflyvningsofficeren uden at kaptajnen behøver at fjerne sit øje fra okularet. På bagsiden af periskopet, i løftekraven, er også lejeringen anbragt. Når periskopet er rettet direkte mod ubådens bov, er pejlingen nul, da målpejlinger angives i forhold til ubådens kurs.
Målpejling skal ikke forveksles – som det er sket i et utal af film og tv-serier – med “vinkel på bov”. Målpejling er den relative pejling fra ubåden til målet. Vinklen på stævnen er den vinkel, hvormed målet krydser, nærmer sig eller bevæger sig væk fra ubåden. Hvis målet er på vej direkte mod ubåden, er vinklen på stævnen nul. Hvis det er på vej direkte væk fra målet, er vinklen på stævnen en-otte-nul. (Pejlinger og hastighed angives altid som enkeltcifre af hensyn til overskueligheden.) Hvis målet krydser vinkelret fra højre til venstre, er vinklen på stævnen bagbord 90°. Væsentligt er vinklen på stævnen den pejling til ubåden fra målet.
Dette billede viser udsigten gennem periskopet med stadimeteret i brug. Der anvendes et delt prisme til at lægge et andet billede af målet oven på det aktuelle billede. Kaptajnen justerer prismen 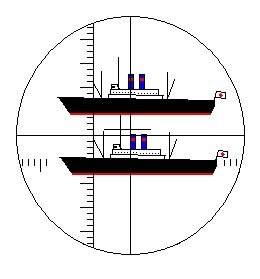 så at vandlinjen på det andet billede er sat på mastetoppen af det faktiske målbillede. Masthovedets højde fra vandet indtastes på drejeskiven, og aflæsningen fås. Stadimeteret måler faktisk vinkler, ikke afstand. Hvis masthovedets højde indtastes nøjagtigt, vil afstanden være korrekt. Hvis masthovedets højde angives forkert, giver det en forkert rækkevidde. (Det samme princip anvendes af landmålere, selv om de har den indlysende fordel, at de baserer deres afstande på en gradueret stang af kendt længde, der holdes af en assistent). I praksis blev de mest nøjagtige afstande altid opnået under øvelser, da ubådene opererede mod enheder fra deres egen flåde, og mastehovedhøjderne var altid kendt. Fjendtlige krigsskibe og fragtskibe involverede ofte en vis mængde gætteri, selv om genkendelsesbøgerne var omhyggelige med at angive mastehovedhøjder, når de var kendt.
så at vandlinjen på det andet billede er sat på mastetoppen af det faktiske målbillede. Masthovedets højde fra vandet indtastes på drejeskiven, og aflæsningen fås. Stadimeteret måler faktisk vinkler, ikke afstand. Hvis masthovedets højde indtastes nøjagtigt, vil afstanden være korrekt. Hvis masthovedets højde angives forkert, giver det en forkert rækkevidde. (Det samme princip anvendes af landmålere, selv om de har den indlysende fordel, at de baserer deres afstande på en gradueret stang af kendt længde, der holdes af en assistent). I praksis blev de mest nøjagtige afstande altid opnået under øvelser, da ubådene opererede mod enheder fra deres egen flåde, og mastehovedhøjderne var altid kendt. Fjendtlige krigsskibe og fragtskibe involverede ofte en vis mængde gætteri, selv om genkendelsesbøgerne var omhyggelige med at angive mastehovedhøjder, når de var kendt.
Annærmelsesprocedure
Når en ubåd finder et mål, er indflyvningen og angrebet i det væsentlige en øvelse i geometri. Kaptajnen skal bestemme den præcise vinkel, hvor han skal affyre sin torpedo, så den rammer målet.
I stationære objekter er dette let. Du skal blot rette torpedoen direkte mod målet, og så længe den bevæger sig i en lige linje, vil den ramme det. Problemet med dette er naturligvis, at hverken ubåden eller målet sandsynligvis rent faktisk er stationært. Med den sjældne undtagelse af angreb på forankrede fartøjer – Priens angreb på HMS Royal Oak i Scapa Flow er måske det mest kendte eksempel – møder ubåde normalt deres mål på havet, hvor både ubåden og målet næsten helt sikkert vil være i bevægelse.
I denne situation kan man ikke skyde på det sted, hvor målet er. I stedet skal du skyde på det sted, hvor målet vil være, når torpedoen når det.
Bearbejdning
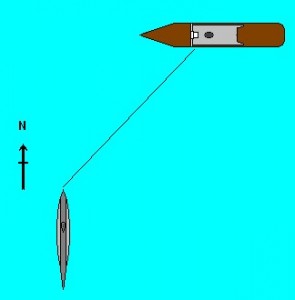 I denne grafik er tilnærmelsen begyndt. Ubåden bevæger sig ret mod nord med 2 knob. Målet bevæger sig stik vest med 6 knob og befinder sig i øjeblikket øst for ubådens bane i en afstand på fire sømil. (For at få plads til det hele i grafikken er afstandene og størrelserne på fartøjerne ikke i skala. Desuden er ubåden af hensyn til klarheden vist i overfladen – den ville være under vandet, hvis dette faktisk skete.
I denne grafik er tilnærmelsen begyndt. Ubåden bevæger sig ret mod nord med 2 knob. Målet bevæger sig stik vest med 6 knob og befinder sig i øjeblikket øst for ubådens bane i en afstand på fire sømil. (For at få plads til det hele i grafikken er afstandene og størrelserne på fartøjerne ikke i skala. Desuden er ubåden af hensyn til klarheden vist i overfladen – den ville være under vandet, hvis dette faktisk skete.
Først centrerer kaptajnen periskopets trådkors på midten af målet eller på det punkt på dets skrog, hvor han ønsker, at torpedoen skal ramme, og råber: “Bearing”. I det øjeblik han har målet nøjagtigt centreret, råber han derefter: “Markér!”
Annæringsofficeren aflæser pejlingen på pejlingringen, der er placeret på periskopets aksel. Denne pejling giver den relative vinkel fra ubåden til målet. I dette tilfælde er det 45°. For klarhedens skyld meddeler indflyvningsofficeren pejlingen som: “Pejling-nul-fire-fem”. (Målpejlinger angives altid som tre tal, og cifrene angives altid separat. “Nul-fire-fem” er mindre tilbøjelig til at blive misforstået end “femogfyrre grader”. Dette gælder især, da udkigsmænd angiver pejlinger som “styrbord fire-fem”, idet de bruger to cifre og altid henviser til den side af skibet, som pejlingen er på. Nogle flåder bruger “rød” for bagbord og “grøn” for styrbord ved indberetning af observationer, da disse er farverne på navigationslysene på disse sider.)
Når målpejlingen er blevet bestemt, indtastes den i Torpedo Data Computer (TDC). Dette er en meget sofistikeret elektromekanisk analog computer. Der blev anvendt to grundlæggende typer under Anden Verdenskrig. I de fleste flåder var TDC’en kun en vinkelopløser, som ville give den korrekte gyroindstilling for torpedoen baseret på de data, der blev indtastet på tidspunktet for aflæsningen, eller på et givet tidspunkt i fremtiden, baseret på kaptajnens bedste gæt om, hvor målet ville være. I den amerikanske version blev der tilføjet en positionsregulator, som var i stand til at holde styr på målets kurs i realtid. Dette var et betydeligt fremskridt i forhold til de ældre systemer og gav mulighed for langt mere præcise målløsninger ved at fjerne det meste af gætteriet.
TDC’en vil altid kende ubådens kurs og hastighed, da disse konstant opdateres fra hovedgyrokompasset og Pitometerloggen. (Denne logbog er i øvrigt ubådens speedometer og ikke den bog, som kaptajnen bruger til at holde styr på de daglige begivenheder). TDC’en har nu også målpejlingen, men har stadig ikke nok information til at udarbejde en målløsning.
Rækkevidde til målet
Nu skal kaptajnen bestemme rækkevidden til målet. For at gøre dette skal han først vide, hvad målet præcist er. Ved at kigge gennem periskopet kan han se, at det er et stort fragtskib. Ubådene har genkendelsesbøger med, som indeholder en liste over alle fjendtlige krigsskibe og handelsskibe, som der findes oplysninger om. Ved at kigge i denne bog finder kaptajnen Oyama Maru, et 4.750 tons tungt japansk fragtskib, som ser ud til at være det skib, han har i sit periskop. Da det er midt i 1944, og Anden Verdenskrig raser, beslutter han, at dette er et legitimt mål, så han fortsætter indflyvningen.
Nu da han kender – eller i det mindste tror han, at han kender identiteten på målet, kigger han op på masteskibets højde. Dette er afstanden fra vandlinjen til det højeste punkt på skibet. Ifølge genkendelsesbogen er dette 100 fod. Dette tal indtastes i stadimeteret i periskopet.
Afstanden kan også bestemmes ved at bruge den aktive sonar på single-ping-indstillingen. Dette er en af de to mest nøjagtige metoder, da den ikke er afhængig af at kende målets mastehøjde. Amerikanske ubåde fra slutningen af krigen har også indbygget en lille radarantenne i søgeperiskopet, hvilket også ville give en nøjagtig afstand, dog med risiko for at kaste mere spray op end det tyndere angrebsperiskop.
Denne grafik viser, hvad kaptajnen ser gennem periskopets stadimeter. Der bruges et delt prisme til at placere et spøgelsesbillede af målet, så dets vandlinje sidder lige i toppen af mastetoppen på det “rigtige” billede. Stadimeteret registrerer faktisk vinklen over vandret i forhold til mastetoppen, ikke afstanden. Derefter udføres der noget grundlæggende matematik, som omsætter denne vinkel til et afstandstal.
Det fungerer således, at set fra en bestemt afstand vil et objekt af en given højde stå i en bestemt vinkel. Hvis du f.eks. ved, at synsvinklen er 1°, og objektet er 100 fod højt, kan du beregne, at synsvinklen og toppen af objektet kun vil berøre hinanden i en afstand på en sømil. Stadimeteret gør simpelthen regnestykket for dig.
En ulempe ved dette er naturligvis, at nøjagtigheden er helt afhængig af, at man kender objektets korrekte højde. (I dette tilfælde målets masthovedhøjde.) I vores eksempel – men ikke i grafikken, hvor skibet er betydeligt tættere på, end det ville være i et rigtigt billede – viser det sig, at masthovedhøjden er 1/4° over vandret. Ved hjælp af formlen R=h/tan(q) betyder det, at målet befinder sig fire sømil fra ubåden. Stadimeteret gør dette internt, uden at kaptajnen eller indflyvningsofficeren behøver at beregne det, og angiver, at målet er 8.100 yards væk.
Dette tal aflæses på en skive i bunden af periskopet og indtastes i TDC, hvilket giver endnu en del af løsningen.
Vinkel på stævnen
For at kunne udarbejde en skudløsning skal kaptajnen også kende vinklen på stævnen for målet. Dette er ikke det samme som målets pejling, på trods af hvad man måske tror fra nogle film og romaner. Målpejlingen fortæller dig, hvor målet befinder sig i forhold til ubåden. Vinklen på stævnen fortæller dig, hvor du er set – hvilket du naturligvis håber, at du ikke er – fra målet.
I vores eksempel, hvor målet passerer fra øst til vest direkte over ubådens stævn, er vinklen på stævnen bagbord 90°. Det vil sige, at bagbord (venstre) side af målet er mod ubåden, og det er i en vinkel på 90° i forhold til dens kurs. Hvis målet kom direkte mod ubåden, ville vinklen på stævnen være nul. Hvis det var på vej direkte væk, ville vinklen på stævnen være 180°. Hvis målet var på en sydvestlig kurs, ville vinklen på stævnen være bagbord 45° osv.
Målets hastighed
Den sidste faktor, der er nødvendig, er målets hastighed. Der er flere metoder til at opnå denne, selv om ingen af dem virkelig kan kaldes 100% nøjagtig.
Først periskopobservation. Periskopoptikken er markeret i grader i både den lodrette og den vandrette akse. Hvis afstanden til målet er kendt, er det muligt at bestemme hastigheden ved at måle den tid, der er gået for at tilbagelægge et givet antal grader. Problemet med denne metode er naturligvis, at den er afhængig af en nøjagtig afstand, da man måler den tid, det tager målet at tilbagelægge et kendt antal grader, og det betyder også, at man skal udstille periskopet, mens man gør det, hvilket er potentielt farligt, hvis fjenden opdager det. (Japanske handelsskibe havde ikke kun dækskanoner med, ofte med kanonbesætninger, der faktisk vidste, hvad de lavede, men også dybdebomber, og de tøvede ikke med at bruge dem.)
For det andet, generel viden. Nogle skibstyper er kendt for rutinemæssigt at sejle med bestemte hastigheder. Dette vil normalt være den mest økonomiske marchhastighed. Men da målets kaptajn måske har travlt, eller måske bevæger sig langsommere end normalt, vil dette have en tendens til at være den mindst præcise metode til at bestemme hastigheden. En erfaren kaptajn kan ofte gætte ret præcist på målets hastighed ud fra bovbølgens udseende. (En af de ting, som krigsskibs camouflagemønstre er beregnet til at gøre, er at gøre det svært for fjenden at kunne se bovbølgen tydeligt.)
For det tredje tæller man omdrejninger. Sonaroperatøren kan lytte til lyden af målets propeller og bestemme antallet af omdrejninger pr. minut. Hvis ubådens kaptajn kender stigningen (den afstand, der tilbagelægges i en omdrejning) af målets propeller, kan han lave et ret præcist skøn over hastigheden. En skrue med en pitch på 24 fod burde f.eks. bevæge skibet 24 fod fremad for hver omdrejning. Ved 100 omdrejninger i minuttet skal skibet derfor bevæge sig 2.400 fod eller 800 yards fremad. Dette ville give en grov afstand på 1 sømil (2.025 yards) hvert 2 1/2 minut eller en hastighed på ca. 23,7 knob. Denne form for hastighed ville normalt indikere et stort krigsskib eller et linjeskib. Fragtskibe var normalt langsommere, og de hurtigste var generelt begrænset til ca. 16 knob. (Brændstoføkonomi var den vigtigste faktor – hurtige skibe bruger meget brændstof, så høj hastighed fandtes mest i passagerskibe, hvor rederiet kunne tage ekstra for en hurtig passage, specialiserede fragtskibe som bananbåde, der skulle levere deres last, inden den blev fordærvet, og krigsskibe, hvor omkostningerne ikke var en vigtig faktor. Under alle omstændigheder kan man, hvis man kender skruehøjden og får en nøjagtig optælling, få et ret godt skøn over hastigheden. Desuden er et skibs skruer langt fra 100 % effektive – de eneste skibe, der formår dette, er ubåde på en betydelig dybde, hvor det store havtryk undertrykker kølvand og kavitation)
Når målets hastighed er blevet bestemt, indtastes denne også i TDC. På dette tidspunkt venter alle i et par minutter og foretager derefter en ny observation. Hvis alle dataene var korrekte, vil målet være der, hvor TDC’s positionsvogter forudsiger. Hvis det ikke er det, foretages flere observationer, og der indlæses korrektioner i TDC’en. Flere observationer over en periode på 10 til 15 minutter skulle fjerne fejlen – eller i det mindste reducere den til et punkt, hvor en træffer er mere sandsynlig end en misser.
Da TDC’en udarbejder disse løsninger, programmeres de gyrovinkler, som den genererer, automatisk ind i torpedoerne. Den gyroskopiske styring gør det muligt at indstille torpedoen til at bevæge sig på en bestemt kurs i stedet for at skulle rette ubåden derhen, hvor kaptajnen ønsker, at torpedoen skal gå, hvilket havde været nødvendigt med de tidlige torpedodesigns, som kun kunne bevæge sig i en lige linje.
Mens alt dette foregår, indstilles torpedoens løbsdybde også. For dette særlige mål, som har en lastet dybgang på 38 fod, er torpedoen indstillet til at løbe i en dybde på 25 fod, så den vil eksplodere et godt stykke under vandlinjen. Hvis der anvendes en magnetisk indflydelsessikring – hvilket den så sent i Anden Verdenskrig ikke ville have været, da selv Bureau of Ordinance på det tidspunkt endelig havde erkendt, at de var upålidelige under feltforhold – ville løbsdybden blive indstillet til 43 fod, så sprænghovedet ville eksplodere direkte under kølen, hvor det ville gøre mest skade.
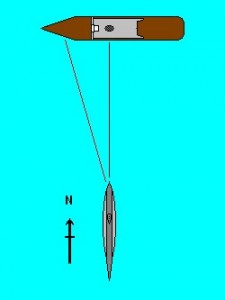 Denne grafik viser ubåden og målet på det tidspunkt, hvor en løsning er blevet udarbejdet, og kaptajnen er klar til at affyre en torpedo. (I den virkelige praksis ville han sandsynligvis affyre mindst to.) Målet befinder sig nu lige foran ubåden i en afstand af 1.400 yards. Med en hastighed på 46 knob vil det tage Mark 14-torpedoen et minut at tilbagelægge denne afstand. I det minut vil skibet have bevæget sig en tiendedel af en sømil fremad, eller ca. 200 yards.
Denne grafik viser ubåden og målet på det tidspunkt, hvor en løsning er blevet udarbejdet, og kaptajnen er klar til at affyre en torpedo. (I den virkelige praksis ville han sandsynligvis affyre mindst to.) Målet befinder sig nu lige foran ubåden i en afstand af 1.400 yards. Med en hastighed på 46 knob vil det tage Mark 14-torpedoen et minut at tilbagelægge denne afstand. I det minut vil skibet have bevæget sig en tiendedel af en sømil fremad, eller ca. 200 yards.
Med andre ord, hvis torpedoen affyres lige fremad, vil målet ikke længere være der, når torpedoen ankommer, og torpedoen vil passere agterud. TDC’s beregninger tager højde for dette og indstiller torpedoen til at bevæge sig på en relativ kurs på 350°. Det betyder, at torpedoen bevæger sig i en vinkel, så dens relative pejling i forhold til målet forbliver konstant. To objekter, der holder en konstant pejling i en krydsningssituation, vil på et tidspunkt ramme hinanden. Ved at lade torpedoen “føre” målet, bør den ramme tæt på midten af målet og have en god chance for at sænke det.
Når torpedoerne er affyret, kan ubåden blive i nærheden for at observere resultatet. Eller, hvis der er eskortefartøjer med målet, kan det være mere klogt at forsøge at slippe væk og lytte efter eventuelle træffere på hydrofonen. Sidstnævnte har den ulempe, at det er vanskeligt at bekræfte sænkningen, men har også den fordel, at det er mere sandsynligt, at ubåden overlever for at tage æren.