Ponieważ okręt podwodny może atakować będąc ukrytym pod wodą, potrzebuje on unikalnego rozwiązania do śledzenia przeciwnika i tu właśnie pojawia się peryskop okrętu podwodnego. Wczesne projekty peryskopów dla okrętów podwodnych, które były używane w czasie II wojny światowej, były bardzo proste, ponieważ posiadały dwa teleskopy skierowane ku sobie.
Prawdopodobnie największą różnicą między okrętem podwodnym a nawodnym jest preferowana metoda ataku. W okresie II wojny światowej okręty nawodne zostały zaprojektowane do strzelania z dział ciężkiego kalibru. Niszczyciele przenosiły także torpedy, które zazwyczaj wystrzeliwano pod kątem 90° do kursu niszczyciela. Lotniskowce używały samolotów i bomb w zasadzie w ten sam sposób, w jaki pancerniki i krążowniki używały swoich dział, choć oczywiście ze znacznie większym zasięgiem i mocą.
Okręty podwodne zazwyczaj atakowały w zanurzeniu. Okręty podwodne są zwykle bardziej podatne na uszkodzenia niż nawodne okręty wojenne. W większości przypadków, jeśli na okręcie podwodnym znajduje się jakikolwiek pancerz, jest on zainstalowany wokół wieżyczki kapitańskiej i mostka, i przeznaczony do ochrony przed bronią lekkiego kalibru, taką jak karabiny maszynowe, lub przed odłamkami pocisków. Okręty nawodne mają zazwyczaj bardziej rozbudowaną ochronę przeciwpancerną. Dla okrętu podwodnego podstawowa ochrona nie pochodzi z ciężkich płyt stalowych, ale z możliwości działania pod powierzchnią, gdzie wróg nie może znaleźć go do strzału.
Główną bronią wojskowego okrętu podwodnego jest torpeda. W II wojnie światowej najczęściej stosowanym typem była torpeda 21-calowa (533 mm), napędzana albo małą turbiną „parową”, albo silnikami elektrycznymi i akumulatorami. Torpedy elektryczne były często nazywane „bezuderzeniowymi”, ponieważ nie pozostawiały widocznej smugi bąbelków spalin, charakterystycznej dla typów parowych. Japońska Cesarska Marynarka Wojenna używała torpedy „tlenowej” o średnicy 24 cali (610 mm). Ta torpeda „Long Lance”, posiadająca głowicę bojową o masie 1000 funtów – prawie dwa razy większej niż w innych marynarkach – była powszechnie uznawana za najskuteczniejszą torpedę, jaką kiedykolwiek zbudowano z punktu widzenia użyteczności jako zabójca okrętów.
 Aby zanurzony okręt podwodny marynarki wojennej mógł zatopić wrogi statek, potrzebny był jakiś sposób na wycelowanie torpedy. Różne marynarki rozwijały różne metodologie. W okresie międzywojennym doktryna amerykańska preferowała użycie sonaru do określania zasięgu, namiaru i kąta celu. Uważano, że postępy w dziedzinie wykrywania i broni przeciw okrętom podwodnym sprawiły, że wystawianie peryskopu w świetle dziennym stało się samobójstwem. W tym celu Marynarka Wojenna Stanów Zjednoczonych zainstalowała w swoich okrętach podwodnych floty wysoce zaawansowane zestawy sonarów i hydrofonów, wraz z komputerami danych torpedowych, które pozostawały znacznie bardziej zaawansowane niż cokolwiek używanego w jakiejkolwiek innej marynarce wojennej aż do końca wojny.
Aby zanurzony okręt podwodny marynarki wojennej mógł zatopić wrogi statek, potrzebny był jakiś sposób na wycelowanie torpedy. Różne marynarki rozwijały różne metodologie. W okresie międzywojennym doktryna amerykańska preferowała użycie sonaru do określania zasięgu, namiaru i kąta celu. Uważano, że postępy w dziedzinie wykrywania i broni przeciw okrętom podwodnym sprawiły, że wystawianie peryskopu w świetle dziennym stało się samobójstwem. W tym celu Marynarka Wojenna Stanów Zjednoczonych zainstalowała w swoich okrętach podwodnych floty wysoce zaawansowane zestawy sonarów i hydrofonów, wraz z komputerami danych torpedowych, które pozostawały znacznie bardziej zaawansowane niż cokolwiek używanego w jakiejkolwiek innej marynarce wojennej aż do końca wojny.
W rzeczywistości ataki sonarowe w zanurzeniu okazały się wyjątkowo nieskuteczne w rzeczywistych warunkach wojennych. Popadając w jeden z najczęstszych błędów militarnych, Marynarka Wojenna Stanów Zjednoczonych opracowała teorię, a następnie postrzegała wyniki testów przez pryzmat tej teorii. Wszelkie wyniki, które zdawały się potwierdzać teorię, były ochoczo przyjmowane, podczas gdy wyniki, które jej nie potwierdzały, były zrzucane na karb „błędu operatora”. Tendencja ta utrzymywała się przez cały okres wojny, do tego stopnia, że wielu dowódców zostało zwolnionych za „brak agresji”, podczas gdy faktycznym problemem było to, że wystrzeliwane przez nich torpedy nie działały. (Bureau of Ordinance twierdziło, że torpedy działały, a ponieważ nie mogli się w tej kwestii mylić, to musieli to być dowódcy.)
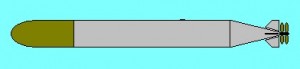
Podczas gdy amerykańscy dowódcy wyższego szczebla przez jakiś czas nie dostrzegali problemów z torpedami, atak zanurzonym sonarem został wyeliminowany bardzo szybko po rozpoczęciu wojny. Szyprowie 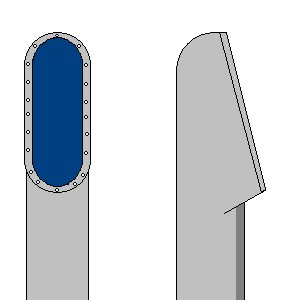 zdali sobie sprawę z dwóch faktów. Po pierwsze, nie trafiali w nic używając samego sonaru. A po drugie, jeśli tylko było się ostrożnym, o wiele trudniej było dostrzec głowicę peryskopu atakującego, niż sądzili teoretycy. Górna część masztu optronicznego została wykonana tak smukła, jak to tylko możliwe, aby ograniczyć obserwowalność. Czynnikami ograniczającymi były wielkość górnej soczewki, która musiała być wystarczająco duża, aby zapewnić przyzwoite działanie w świetle dziennym, oraz górny pryzmat i jego mechanizm ustawiający. Górny pryzmat mógł być odchylany od wieżyczki, aby umożliwić podniesienie pola widzenia w celu poszukiwania w powietrzu, lub opuszczany, aby patrzeć z bliska.
zdali sobie sprawę z dwóch faktów. Po pierwsze, nie trafiali w nic używając samego sonaru. A po drugie, jeśli tylko było się ostrożnym, o wiele trudniej było dostrzec głowicę peryskopu atakującego, niż sądzili teoretycy. Górna część masztu optronicznego została wykonana tak smukła, jak to tylko możliwe, aby ograniczyć obserwowalność. Czynnikami ograniczającymi były wielkość górnej soczewki, która musiała być wystarczająco duża, aby zapewnić przyzwoite działanie w świetle dziennym, oraz górny pryzmat i jego mechanizm ustawiający. Górny pryzmat mógł być odchylany od wieżyczki, aby umożliwić podniesienie pola widzenia w celu poszukiwania w powietrzu, lub opuszczany, aby patrzeć z bliska.
Jeśli projektant peryskopu – i zatrudniająca go marynarka – był skłonny zrezygnować z możliwości poszukiwania w powietrzu i zbudować peryskop ze stałą głowicą, jego średnica mogła być dość mała. W niektórych przypadkach nie wiele więcej niż 1/2 cala. Standardowy peryskop atakujący stosowany w amerykańskich okrętach podwodnych miał w górnej części średnicę 1-1/4 cala. Peryskopy poszukiwawcze lub „nocne” mają większą głowicę dla zwiększenia możliwości zbierania światła. Późnowojenne amerykańskie peryskopy poszukiwawcze zawierały w głowicy falowód radarowy.
Jednym z powszechnie stosowanych terminów jest głębokość peryskopu, którą definiuje się jako głębokość potrzebną do wysunięcia lunety ponad powierzchnię wody.
Kontrola peryskopu
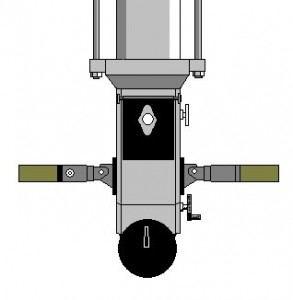 Obraz po lewej stronie przedstawia uproszczony widok okularu i elementów sterujących peryskopu atakującego Kollmorgen, podobnego do typu stosowanego w większości atakujących okrętów podwodnych floty amerykańskiej podczas II wojny światowej. Główny trzon peryskopu spoczywa na łożyskach kulkowych w ciężkim kołnierzu podnoszącym na górze. Dwa drążki wciągarki przymocowane do kołnierza wchodzą do cylindrów hydraulicznych umieszczonych w nożycach peryskopu nad wieżą konningową. Aby podnieść peryskop, ciśnienie hydrauliczne jest wywierane na dolne części tłoków wewnątrz cylindrów. Aby opuścić peryskop, płyn hydrauliczny wypływa z cylindrów i wraca do zbiornika. Grawitacja opuszcza peryskop po zwolnieniu ciśnienia hydraulicznego.
Obraz po lewej stronie przedstawia uproszczony widok okularu i elementów sterujących peryskopu atakującego Kollmorgen, podobnego do typu stosowanego w większości atakujących okrętów podwodnych floty amerykańskiej podczas II wojny światowej. Główny trzon peryskopu spoczywa na łożyskach kulkowych w ciężkim kołnierzu podnoszącym na górze. Dwa drążki wciągarki przymocowane do kołnierza wchodzą do cylindrów hydraulicznych umieszczonych w nożycach peryskopu nad wieżą konningową. Aby podnieść peryskop, ciśnienie hydrauliczne jest wywierane na dolne części tłoków wewnątrz cylindrów. Aby opuścić peryskop, płyn hydrauliczny wypływa z cylindrów i wraca do zbiornika. Grawitacja opuszcza peryskop po zwolnieniu ciśnienia hydraulicznego.
Pokrętło w prawej górnej części peryskopu służy do regulacji ostrości. Czarna płytka, z okularem w górnej połowie, to zespół filtru promieni. Zawiera on tarczę z trzema kolorowymi – i jednym przezroczystym – filtrami, które można obracać przed okularem, aby ułatwić widoczność w różnych warunkach oświetleniowych. Filtry są koloru czerwonego, zielonego i żółtego. Gdy peryskop jest używany, zamontowany jest podwójny gumowy okular. Jedna strona okularu jest zablokowana i w rzeczywistości używane jest tylko jedno oko. Okular jest odwracalny, aby kapitan mógł używać swojego dominującego oka. (Oprócz bycia prawo- lub leworęcznym, ludzie są również prawo- lub leworęczni, choć większość prawdopodobnie nie ma pojęcia, które.)
Zewnętrzna część lewego uchwytu obraca się, pozwalając górnemu pryzmatowi podnosić się lub opuszczać. Przycisk na wewnętrznej części uchwytu to detent. Pozwala to obracającemu się uchwytowi na zatrzaśnięcie się w zaprogramowanych pozycjach tak, że zaczynając z pryzmatem na pełnym wzniesieniu i przesuwając się do następnego detentu po zakończeniu pełnego omiatania horyzontu, kapitan może opuścić pryzmat do następnej pozycji przez wyczucie. Trzy pełne przesunięcia obejmują wszystkie pozycje.
Prawy uchwyt reguluje moc optyczną peryskopu, który optycznie jest również lunetą. Niskie ustawienie to 1,5 mocy, a wysokie to 6 mocy.
Pokrętło poniżej prawej rączki to regulacja stadimetru. Stadimetr jest urządzeniem do pomiaru odległości, które pozwala kapitanowi na planowanie ataku z dużo większą dokładnością niż tylko zgadywanie, jak daleko znajduje się cel. Odległość do celu, w jardach, odczytuje się z dużej czarnej tarczy na dole peryskopu. Tarcza ta jest zdublowana na tylnej stronie peryskopu, dzięki czemu odczyt może być dokonywany również przez oficera podejścia, bez konieczności odrywania oka od okularu przez kapitana. Również z tyłu peryskopu, w kołnierzu podnoszącym, znajduje się pierścień łożyskowy. Gdy peryskop jest skierowany bezpośrednio na dziób okrętu podwodnego, namiar wynosi zero, ponieważ namiary na cel podawane są względem kursu okrętu podwodnego.
Namiaru na cel nie należy mylić – jak to miało miejsce w wielu filmach i programach telewizyjnych – z „kątem na dziobie”. Target bearing to względny namiar z okrętu podwodnego na cel. Kąt na dziobie to kąt, pod jakim cel przecina, zbliża się lub oddala od okrętu podwodnego. Jeśli cel kieruje się bezpośrednio na okręt podwodny, kąt na dziobie wynosi zero. Jeśli cel zmierza bezpośrednio w kierunku okrętu podwodnego, kąt na dziobie wynosi jeden-osiem-zero. (Dla jasności, namiary i prędkość zawsze podawane są jako pojedyncze cyfry.) Jeśli cel przechodzi pod kątem prostym z prawej do lewej, kąt na dziobie wynosi 90°. Zasadniczo kąt na dziobie to namiar na okręt podwodny od celu.
Na tym obrazku pokazano widok przez peryskop z używanym stadimetrem. Pryzmat rozszczepiający służy do nałożenia drugiego obrazu celu na obraz rzeczywisty. Kapitan reguluje pryzmat 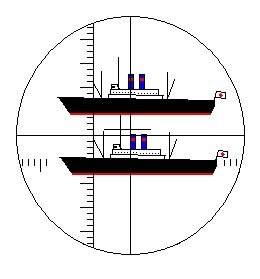 tak, aby linia wodna drugiego obrazu była ustawiona na maszcie rzeczywistego obrazu celu. Wysokość masztu od wody jest wpisywana na tarczy i otrzymywany jest odczyt. Stadimetr w rzeczywistości mierzy kąty, a nie odległość. Jeśli wysokość masztu jest wprowadzona dokładnie, zasięg będzie prawidłowy. Błędne podanie wysokości masztu daje nieprawidłowy zasięg. (Ta sama zasada jest stosowana przez geodetów, choć mają oni tę oczywistą przewagę, że opierają swoje zasięgi na tyczce z podziałką o znanej długości, trzymanej przez asystenta). W praktyce najdokładniejsze zasięgi uzyskiwano zawsze podczas ćwiczeń, ponieważ okręty podwodne operowały przeciwko jednostkom własnej floty, a wysokości masztów były zawsze znane. Wrogie okręty wojenne i frachtowce często wymagały pewnej dozy zgadywania, choć księgi rozpoznawcze starannie wymieniały wysokości masztów, gdy tylko były one znane.
tak, aby linia wodna drugiego obrazu była ustawiona na maszcie rzeczywistego obrazu celu. Wysokość masztu od wody jest wpisywana na tarczy i otrzymywany jest odczyt. Stadimetr w rzeczywistości mierzy kąty, a nie odległość. Jeśli wysokość masztu jest wprowadzona dokładnie, zasięg będzie prawidłowy. Błędne podanie wysokości masztu daje nieprawidłowy zasięg. (Ta sama zasada jest stosowana przez geodetów, choć mają oni tę oczywistą przewagę, że opierają swoje zasięgi na tyczce z podziałką o znanej długości, trzymanej przez asystenta). W praktyce najdokładniejsze zasięgi uzyskiwano zawsze podczas ćwiczeń, ponieważ okręty podwodne operowały przeciwko jednostkom własnej floty, a wysokości masztów były zawsze znane. Wrogie okręty wojenne i frachtowce często wymagały pewnej dozy zgadywania, choć księgi rozpoznawcze starannie wymieniały wysokości masztów, gdy tylko były one znane.
Procedura podejścia
Gdy okręt podwodny znajdzie cel, podejście i atak jest zasadniczo ćwiczeniem z geometrii. Kapitan musi określić dokładny kąt, pod jakim należy wystrzelić torpedę, aby trafiła w cel.
W przypadku obiektów nieruchomych jest to łatwe. Wystarczy wycelować torpedę bezpośrednio w cel i tak długo, jak będzie ona poruszać się w linii prostej, trafi w niego. Problem w tym, że ani okręt podwodny, ani cel nie mogą być w rzeczywistości nieruchome. Z rzadkimi wyjątkami ataków na zakotwiczone statki – atak Priena na HMS Royal Oak w Scapa Flow jest chyba najbardziej znanym przykładem – okręty podwodne zwykle napotykają swoje cele na morzu, gdzie zarówno okręt podwodny, jak i cel prawie na pewno będą się poruszać.
W tej sytuacji nie można strzelać tam, gdzie znajduje się cel. Zamiast tego musisz strzelać tam, gdzie cel będzie się znajdował, gdy torpeda go dosięgnie.
Nośny
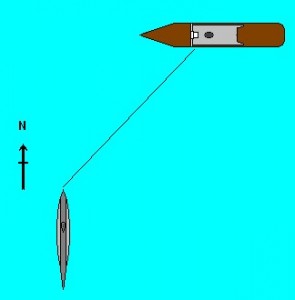 Na tej grafice rozpoczęło się podejście. Okręt podwodny porusza się na północ z prędkością 2 węzłów. Cel porusza się na zachód z prędkością 6 węzłów i znajduje się obecnie na wschód od toru okrętu podwodnego, w zasięgu czterech mil morskich. (Aby wszystko zmieścić w grafice, odległości i rozmiary okrętów nie są w skali. Ponadto okręt podwodny jest pokazany na powierzchni dla jasności – byłby zanurzony, gdyby to się rzeczywiście działo.
Na tej grafice rozpoczęło się podejście. Okręt podwodny porusza się na północ z prędkością 2 węzłów. Cel porusza się na zachód z prędkością 6 węzłów i znajduje się obecnie na wschód od toru okrętu podwodnego, w zasięgu czterech mil morskich. (Aby wszystko zmieścić w grafice, odległości i rozmiary okrętów nie są w skali. Ponadto okręt podwodny jest pokazany na powierzchni dla jasności – byłby zanurzony, gdyby to się rzeczywiście działo.
Po pierwsze, kapitan centruje krzyż kresek peryskopu na środku celu, lub na punkcie na jego kadłubie, w który chce, aby torpeda trafiła, wołając „Bearing”. W momencie, gdy cel jest dokładnie wyśrodkowany, woła on „Mark!”
Oficer podchodzący odczytuje namiar z pierścienia namiaru umieszczonego na trzonie peryskopu. Łożysko to podaje względny kąt, jaki dzieli okręt podwodny od celu. W tym przypadku jest to 45°. Dla jasności, oficer podchodzący ogłasza namiar jako „namiar zero-cztery-pięć”. (Namiary na cel są zawsze podawane jako trzy liczby, a cyfry są zawsze podawane oddzielnie. „Zero-cztery-pięć” jest mniej prawdopodobne, że zostanie źle zrozumiane niż „czterdzieści pięć stopni”. Zwłaszcza, że obserwatorzy podają namiary jako „sterburta cztery-pięć”, używając dwóch cyfr i zawsze odnosząc się do strony okrętu, na której prowadzono obserwację. Niektóre marynarki używają „czerwonego” dla lewej i „zielonego” dla prawej burty w raportach z obserwacji, są to kolory świateł nawigacyjnych na tych burtach.)
Po określeniu namiaru celu, jest on wprowadzany do Torpedo Data Computer (TDC). Jest to bardzo skomplikowany elektro-mechaniczny komputer analogowy. Podczas II wojny światowej używano dwóch podstawowych typów. W większości marynarek wojennych TDC był jedynie urządzeniem do rozwiązywania kątów, które podawało właściwe ustawienie żyroskopu dla torpedy na podstawie danych wprowadzonych w momencie odczytu, lub w określonym czasie w przyszłości, na podstawie najlepszego przypuszczenia kapitana, gdzie będzie cel. Amerykańska wersja dodała do tego czujnik pozycji, który był w stanie śledzić kurs celu w czasie rzeczywistym. Stanowiło to znaczny postęp w stosunku do starszych systemów i pozwoliło na znacznie dokładniejsze wyznaczanie celów dzięki wyeliminowaniu większości domysłów.
TDC zawsze będzie znał kurs i prędkość okrętu podwodnego, ponieważ są one stale aktualizowane na podstawie głównego żyrokompasu i dziennika Pitometru. (Tak na marginesie, ten dziennik to prędkościomierz okrętu podwodnego, a nie książka, której kapitan używa do śledzenia codziennych wydarzeń). TDC ma teraz także namiar na cel, ale wciąż nie ma wystarczających informacji, aby opracować rozwiązanie celu.
Range to Target
Teraz kapitan musi określić zasięg do celu. Aby to zrobić, musi najpierw wiedzieć, co jest celem. Patrząc przez peryskop widzi, że jest to duży frachtowiec. Na okrętach podwodnych znajdują się książki rozpoznawcze, w których wyszczególnione są wszystkie wrogie okręty wojenne i statki handlowe, o których dostępne są informacje. Przeglądając tę książkę kapitan znajduje Oyama Maru, ważący 4750 ton japoński frachtowiec, który wydaje się być tym statkiem, który ma w peryskopie. Ponieważ jest połowa 1944 roku, a II wojna światowa szaleje, kapitan decyduje, że jest to uzasadniony cel, więc kontynuuje podejście.
Teraz, gdy zna – lub przynajmniej uważa, że zna – tożsamość celu, sprawdza wysokość masztu. Jest to odległość od linii wodnej do najwyższego punktu na statku. Zgodnie z księgą rozpoznania jest to 100 stóp. Ta liczba jest wprowadzana do stadimetru w peryskopie.
Zasięg może być również określony przy użyciu aktywnego sonaru na ustawieniu single-ping. Jest to jedna z dwóch najdokładniejszych metod, gdyż nie zależy od znajomości wysokości masztu celu. Późnowojenne amerykańskie okręty podwodne miały również wbudowaną w peryskop poszukiwawczy maleńką antenę radarową, która również podawała dokładny zasięg, ryzykując przy tym wyrzucanie większej ilości aerozolu niż cieńszy peryskop atakujący.
Ta grafika pokazuje, co widzi kapitan przez stadimetr peryskopu. Podzielony pryzmat jest używany do umieszczenia obrazu widmowego celu tak, aby jego linia wodna znajdowała się dokładnie na szczycie masztu „prawdziwego” obrazu. Stadimetr w rzeczywistości rejestruje kąt nad poziomem do masztu, a nie odległość. Niektóre podstawowe matematyka jest następnie wykonywane, który tłumaczy, że kąt do odległości figure.
Sposób to działa jest to, że postrzegane z każdej konkretnej odległości, obiekt z danej wysokości będzie w szczególnym kątem. Jeśli wiesz, że kąt widzenia wynosi 1°, na przykład, a obiekt jest wysoki na 100 stóp, możesz obliczyć, że kąt widzenia i wierzchołek obiektu dotkną się tylko w odległości jednej mili morskiej. Stadimetr po prostu robi to za Ciebie.
Jedną wadą tego, oczywiście, jest to, że dokładność jest całkowicie zależna od znajomości prawidłowej wysokości obiektu. (W naszym przykładzie – ale nie na grafice, gdzie statek jest znacznie bliżej niż w prawdziwym widoku – wysokość masztu okazała się być 1/4° powyżej poziomu. Korzystając ze wzoru R=h/tan(q) oznacza to, że cel znajduje się cztery mile morskie od okrętu podwodnego. Stadimetr wykonuje to wewnętrznie, bez potrzeby obliczania przez kapitana lub oficera podejścia, i wskazuje, że cel znajduje się w odległości 8 100 jardów.
Liczba ta jest odczytywana z tarczy u podstawy peryskopu i wprowadzana do TDC, stanowiąc kolejną część rozwiązania.
Kąt na dziobie
Aby opracować rozwiązanie strzelania, kapitan musi również znać kąt na dziobie dla celu. To nie jest to samo, co namiar na cel, pomimo tego, co można sobie wyobrazić na podstawie niektórych filmów i powieści. Łożysko celu mówi, gdzie cel znajduje się w stosunku do okrętu podwodnego. Kąt na dziobie mówi ci, gdzie jesteś widziany – co oczywiście masz nadzieję, że nie jesteś – od celu.
W naszym przykładzie, gdzie cel przechodzi ze wschodu na zachód bezpośrednio przez dziób okrętu podwodnego, kąt na dziobie wynosi 90°. Oznacza to, że lewa burta celu jest skierowana w stronę okrętu podwodnego i znajduje się pod kątem 90° w stosunku do jego kursu. Gdyby cel zbliżał się bezpośrednio do okrętu podwodnego, kąt na dziobie wynosiłby zero. Jeśli oddalałby się bezpośrednio, kąt na dziobie wynosiłby 180°. Jeśli cel był na kursie południowo-zachodnim, kąt na dziobie wynosiłby 45°, itd.
Prędkość celu
Ostatnim potrzebnym czynnikiem jest prędkość celu. Istnieje kilka metod jej uzyskania, choć żadnej nie można nazwać w 100% dokładną.
Po pierwsze, obserwacja przez peryskop. Optyka peryskopu jest oznaczona w stopniach zarówno w osi pionowej jak i poziomej. Jeśli znana jest odległość do celu, możliwe jest określenie prędkości poprzez odmierzanie czasu, jaki musi upłynąć, aby statek pokonał daną liczbę stopni. Problem z tą metodą polega oczywiście na tym, że zależy ona od dokładnego zasięgu, ponieważ mierzy się czas, jaki cel potrzebuje na pokonanie znanej liczby stopni, a także oznacza odsłonięcie peryskopu podczas wykonywania pomiaru, co jest potencjalnie niebezpieczne, jeśli zauważy to wróg. (Japońskie statki handlowe nosiły nie tylko działa pokładowe, często z załogą, która wiedziała, co robi, ale także ładunki głębinowe, i nie wahały się ich użyć.)
Po drugie, wiedza ogólna. Niektóre typy statków są znane z tego, że rutynowo poruszają się z pewnymi prędkościami. Zwykle jest to najbardziej ekonomiczna prędkość przelotowa. Jednakże, ponieważ kapitan celu może się spieszyć, lub poruszać się wolniej niż zwykle, będzie to najmniej dokładna metoda określenia prędkości. Doświadczony kapitan może często dość dokładnie odgadnąć prędkość celu na podstawie wyglądu fali dziobowej. (Jedną z rzeczy, jakie mają na celu wzory kamuflażu okrętów wojennych, jest utrudnienie wrogowi wyraźnego zobaczenia fali dziobowej.)
Po trzecie, liczenie obrotów. Operator sonaru może wsłuchać się w dźwięk śrub napędowych celu i określić liczbę obrotów na minutę. Jeśli kapitan okrętu podwodnego zna skok (odległość pokonywaną podczas jednego obrotu) śmigieł celu, może dość dokładnie oszacować prędkość. Na przykład, śruba o skoku 24 stopy powinna przesuwać okręt do przodu o 24 stopy na każdy obrót. Sto obrotów na minutę powinno zatem przesunąć okręt do przodu o 2400 stóp, czyli 800 jardów. Dałoby to przybliżony dystans przebytej mili morskiej (2 025 jardów) co 2-1/2 minuty lub prędkość około 23,7 węzła. Taka prędkość wskazywałaby na duży okręt wojenny lub liniowiec. Frachtowce były zwykle wolniejsze, a najszybsze ograniczały się do około 16 węzłów. (Oszczędność paliwa była głównym czynnikiem – szybkie statki zużywają dużo paliwa, więc duże prędkości występowały głównie na statkach pasażerskich, gdzie linia mogła pobierać dodatkowe opłaty za szybki rejs, na wyspecjalizowanych frachtowcach, takich jak łodzie do przewozu bananów, które musiały dostarczyć swój ładunek zanim się zepsuł, oraz na okrętach wojennych, gdzie koszty nie były głównym czynnikiem. W każdym razie, jeśli skok śruby jest znany i uzyskano dokładną liczbę, może to dać całkiem dobre oszacowanie prędkości. Ponadto, śruby okrętowe są dalekie od bycia w 100% sprawnymi – jedynymi statkami, którym się to udaje, są okręty podwodne na znacznej głębokości, gdzie wielkie ciśnienie morskie tłumi wzburzenie i kawitację.)
Po określeniu prędkości celu, jest ona również wprowadzana do TDC. W tym momencie wszyscy czekają przez kilka minut, a następnie dokonują kolejnej obserwacji. Jeśli wszystkie dane były poprawne, cel znajdzie się tam, gdzie przewiduje to czujnik położenia TDC. Jeśli tak nie jest, wykonuje się kolejne obserwacje i wprowadza poprawki do TDC. Kilka obserwacji w okresie 10 do 15 minut powinno wyeliminować błąd – lub przynajmniej zmniejszyć go do punktu, w którym trafienie jest bardziej prawdopodobne niż chybienie.
Jak TDC wypracowuje te rozwiązania, kąty żyroskopowe, które generuje są automatycznie programowane w torpedach. Naprowadzanie żyroskopowe pozwala na ustawienie torpedy tak, by płynęła określonym kursem, zamiast kierować okręt podwodny tam, gdzie kapitan chce, by torpeda płynęła, co było konieczne we wczesnych konstrukcjach torped, które mogły płynąć tylko w linii prostej.
Podczas gdy to wszystko się dzieje, ustawiana jest także głębokość biegu torpedy. Dla tego konkretnego celu, który ma zanurzenie 38 stóp, torpeda jest ustawiona na głębokość 25 stóp, tak aby eksplodowała znacznie poniżej linii wodnej. Jeśli użyto zapalnika magnetycznego – co w tak późnym okresie II wojny światowej nie miałoby miejsca, gdyż do tego czasu nawet Biuro Ordynacji uznało, że są one zawodne w warunkach polowych – głębokość biegu ustawiono by na 43 stopy, tak by głowica wybuchła bezpośrednio pod stępką, gdzie wyrządziłaby największe szkody.
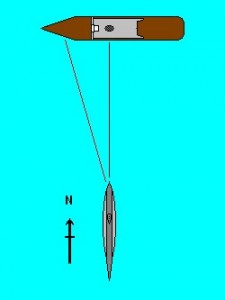 Ta grafika przedstawia okręt podwodny i cel w momencie, gdy wypracowano rozwiązanie i kapitan jest gotowy do odpalenia torpedy. (Cel znajduje się teraz dokładnie przed okrętem podwodnym, w odległości 1400 jardów. Przy prędkości 46 węzłów torpeda Mark 14 będzie potrzebowała minuty na przebycie tej odległości. W ciągu tej minuty okręt przesunie się do przodu o jedną dziesiątą mili morskiej, czyli o około 200 jardów.
Ta grafika przedstawia okręt podwodny i cel w momencie, gdy wypracowano rozwiązanie i kapitan jest gotowy do odpalenia torpedy. (Cel znajduje się teraz dokładnie przed okrętem podwodnym, w odległości 1400 jardów. Przy prędkości 46 węzłów torpeda Mark 14 będzie potrzebowała minuty na przebycie tej odległości. W ciągu tej minuty okręt przesunie się do przodu o jedną dziesiątą mili morskiej, czyli o około 200 jardów.
Innymi słowy, jeśli torpeda zostanie wystrzelona na wprost, celu już tam nie będzie, gdy torpeda dotrze, a torpeda przejdzie za rufę. Obliczenia TDC biorą to pod uwagę i ustawiają torpedę na kurs względny 350°. Oznacza to, że torpeda porusza się pod takim kątem, że jej względny namiar na cel pozostaje stały. Dwa obiekty, które utrzymują stały namiar w sytuacji krzyżowania się, w końcu uderzą w siebie. Dzięki temu, że torpeda „prowadzi” cel, powinna trafić blisko środka celu i mieć duże szanse na jego zatopienie.
Po wystrzeleniu torped okręt podwodny może pozostać w pobliżu, aby obserwować wynik. Albo, jeśli w pobliżu celu znajdują się okręty eskorty, rozsądniejszym rozwiązaniem może być próba wymknięcia się i nasłuchiwanie ewentualnych trafień na hydrofonach. To ostatnie rozwiązanie ma tę wadę, że utrudnia potwierdzenie zatopienia, ale ma też tę zaletę, że zwiększa prawdopodobieństwo, że okręt podwodny przeżyje, by przypisać sobie zasługi.