Aangezien een onderzeeboot kan aanvallen terwijl hij onder water verborgen is, heeft hij een unieke oplossing nodig om zijn vijand op te sporen en dat is waar de onderzeebootperiscoop om de hoek komt kijken. De vroege ontwerpen van de onderzeeër periscoop die werden gebruikt in de Tweede Wereldoorlog waren zeer eenvoudig door in wezen twee telescopen wijzen naar elkaar.
Misschien wel het grootste verschil tussen een onderzeeër en een oppervlakte oorlogsschip is de voorkeursmethode van de aanval. Tijdens de Tweede Wereldoorlog werden oppervlakteschepen ontworpen om het uit te schieten met zwaar kaliber geschut. Destroyers hadden ook torpedo’s aan boord, die gewoonlijk werden gelanceerd in een hoek van 90° ten opzichte van de koers van de destroyer. Vliegdekschepen gebruikten vliegtuigen en bommen op in wezen dezelfde manier als slagschepen en kruisers hun kanonnen gebruikten, hoewel uiteraard met een aanzienlijk groter bereik en vermogen.
Onderzeeërs vielen over het algemeen aan terwijl ze onder water lagen. Onderzeeboten zijn normaliter kwetsbaarder voor schade dan oppervlakte oorlogsschepen. Als een onderzeeër al voorzien is van bepantsering, dan is deze meestal aangebracht rond de verkeerstoren en de brug, en bedoeld ter bescherming tegen licht kaliber wapens, zoals machinegeweren, of tegen granaatsplinters. Oppervlakte-oorlogsschepen dragen over het algemeen een meer uitgebreide pantserbescherming. Voor de onderzeeër komt de primaire bescherming niet van zware stalen platen, maar van het kunnen opereren onder de oppervlakte, waar de vijand hem niet kan vinden om op te schieten.
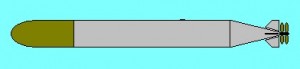
Het belangrijkste wapen van een militaire onderzeeër is de torpedo. In de Tweede Wereldoorlog was het meest voorkomende type een 21-inch (533 mm) torpedo, aangedreven door ofwel een kleine “stoom” turbine of door elektromotoren en batterijen. De elektrische torpedo’s werden vaak “wakeloos” genoemd, omdat ze niet het zichtbare spoor van uitlaatbellen achterlieten dat kenmerkend was voor de stoomtypes. De Japanse Keizerlijke Marine beschikte over een “zuurstof” torpedo van 610 mm (24 inch). Deze “Long Lance” torpedo, met een kernkop van 1000 pond – bijna tweemaal de explosieve kracht van die in andere marines – wordt algemeen erkend als de meest effectieve torpedo ooit gebouwd vanuit het oogpunt van bruikbaarheid als scheepsdoder.
 Om een onderzeeboot van de marine een vijandelijk schip te laten zinken, was een manier nodig om de torpedo’s te richten. Verschillende marines ontwikkelden verschillende methodes. Tijdens het interbellum gaf de Amerikaanse doctrine de voorkeur aan het gebruik van sonar voor het bepalen van doelbereik, peiling en hoek. Men geloofde dat de vooruitgang in opsporing en anti-onderzeebootwapens het suïcidaal had gemaakt om een periscoop bloot te stellen bij daglicht. Daarom installeerde de Amerikaanse marine zeer geavanceerde sonar- en hydrofooninstallaties in haar onderzeeërs, samen met torpedocomputercomputers die aanzienlijk geavanceerder bleven dan wat ook in andere marines werd gebruikt tot ver na het einde van de oorlog.
Om een onderzeeboot van de marine een vijandelijk schip te laten zinken, was een manier nodig om de torpedo’s te richten. Verschillende marines ontwikkelden verschillende methodes. Tijdens het interbellum gaf de Amerikaanse doctrine de voorkeur aan het gebruik van sonar voor het bepalen van doelbereik, peiling en hoek. Men geloofde dat de vooruitgang in opsporing en anti-onderzeebootwapens het suïcidaal had gemaakt om een periscoop bloot te stellen bij daglicht. Daarom installeerde de Amerikaanse marine zeer geavanceerde sonar- en hydrofooninstallaties in haar onderzeeërs, samen met torpedocomputercomputers die aanzienlijk geavanceerder bleven dan wat ook in andere marines werd gebruikt tot ver na het einde van de oorlog.
In feite bleken sonaraanvallen onder water opmerkelijk ondoeltreffend in werkelijke oorlogsomstandigheden. Vallend in een van de meest voorkomende militaire denkfouten, ontwikkelde de Amerikaanse marine een theorie en bekeek vervolgens de testresultaten door de lens van die theorie. Alle resultaten die de theorie leken te ondersteunen werden gretig omarmd, terwijl resultaten die de theorie niet ondersteunden werden afgedaan als “bedieningsfouten”. Deze tendens zette zich voort tot ver in de oorlog, in die mate dat een aantal commandanten werd ontslagen wegens “gebrek aan agressie” terwijl het eigenlijke probleem was dat de torpedo’s die zij afvuurden niet werkten. (Het Bureau of Ordinance zei dat de torpedo’s wel werkten, en omdat zij zich daar onmogelijk in konden vergissen, moesten het wel de commandanten zijn.)
Terwijl Amerikaanse hoge commandanten de torpedoproblemen nog enige tijd over het hoofd bleven zien, werd de Sonar-aanval onder water zeer snel geëlimineerd toen de oorlog eenmaal begon. De schippers 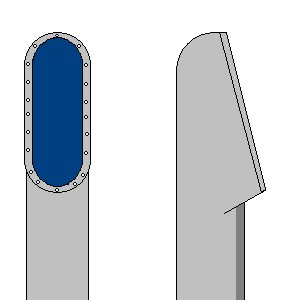 herkenden twee feiten. Ten eerste, ze raakten niets met Sonar alleen. En ten tweede, zolang je voorzichtig was, was het een stuk moeilijker om de kop van de aanvalsperiscoop te zien dan de theoretici dachten. Het bovenste deel van de optronische mast werd zo slank mogelijk gemaakt om de waarneembaarheid te verminderen. De beperkende factoren waren de grootte van de bovenste lens, die groot genoeg moest zijn om bij daglicht goed te kunnen werken, en het bovenste prisma en het uitlijnmechanisme. Het bovenste prisma kon vanaf de conningstoren worden gekanteld, zodat het gezichtsveld kon worden verhoogd om in de lucht te zoeken, of worden ingedrukt om van dichtbij te kijken.
herkenden twee feiten. Ten eerste, ze raakten niets met Sonar alleen. En ten tweede, zolang je voorzichtig was, was het een stuk moeilijker om de kop van de aanvalsperiscoop te zien dan de theoretici dachten. Het bovenste deel van de optronische mast werd zo slank mogelijk gemaakt om de waarneembaarheid te verminderen. De beperkende factoren waren de grootte van de bovenste lens, die groot genoeg moest zijn om bij daglicht goed te kunnen werken, en het bovenste prisma en het uitlijnmechanisme. Het bovenste prisma kon vanaf de conningstoren worden gekanteld, zodat het gezichtsveld kon worden verhoogd om in de lucht te zoeken, of worden ingedrukt om van dichtbij te kijken.
Als de periscoopontwerper – en de marine die hem in dienst had – bereid was af te zien van de mogelijkheid om in de lucht te zoeken en een periscoop met een vaste kop te bouwen, kon de diameter vrij klein zijn. In sommige gevallen niet veel meer dan een halve inch. De standaard aanvalsperiscoop die in Amerikaanse onderzeeërs werd gebruikt, had aan de bovenkant een diameter van 1,25 duim. Zoek- of “nacht”-periscopen hebben een grotere kop om meer licht te kunnen opvangen. Amerikaanse zoekperiscopen uit de late oorlog bevatten een radar-golfgeleider in de kop.
Een gangbare term is periscoopdiepte die wordt gedefinieerd als de diepte die nodig is om de periscoop boven het wateroppervlak uit te steken.
Periscoopbediening
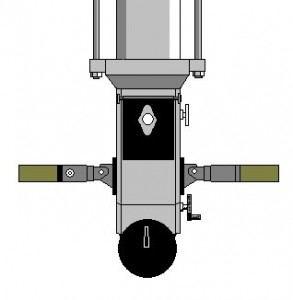 De afbeelding links toont een vereenvoudigde weergave van het oculair en de bediening van een Kollmorgen-aanvalsperiscoop, vergelijkbaar met het type dat tijdens de Tweede Wereldoorlog in de meeste aanvalsonderzeeërs van de Amerikaanse vloot werd gebruikt. De hoofdas van de periscoop rust op kogellagers in de zware hijskraag aan de bovenkant. De twee hijsstangen die aan de kraag zijn bevestigd, gaan naar hydraulische cilinders die zich in de periscoopscharen boven de conningtoren bevinden. Om de periscoop omhoog te brengen, wordt hydraulische druk uitgeoefend op de onderkant van de zuigers in de cilinders. Om de periscoop te laten zakken, laat men de hydraulische vloeistof uit de cilinders in het reservoir stromen. De zwaartekracht laat de periscoop zakken zodra de hydraulische druk is opgeheven.
De afbeelding links toont een vereenvoudigde weergave van het oculair en de bediening van een Kollmorgen-aanvalsperiscoop, vergelijkbaar met het type dat tijdens de Tweede Wereldoorlog in de meeste aanvalsonderzeeërs van de Amerikaanse vloot werd gebruikt. De hoofdas van de periscoop rust op kogellagers in de zware hijskraag aan de bovenkant. De twee hijsstangen die aan de kraag zijn bevestigd, gaan naar hydraulische cilinders die zich in de periscoopscharen boven de conningtoren bevinden. Om de periscoop omhoog te brengen, wordt hydraulische druk uitgeoefend op de onderkant van de zuigers in de cilinders. Om de periscoop te laten zakken, laat men de hydraulische vloeistof uit de cilinders in het reservoir stromen. De zwaartekracht laat de periscoop zakken zodra de hydraulische druk is opgeheven.
De knop rechtsboven op de periscoop wordt gebruikt om de scherpstelling te regelen. De zwarte plaat, met het oculair in de bovenste helft, is het straalfilter. Deze bevat een schijf met drie gekleurde – en één doorzichtige – filters, die voor het oculair kunnen worden gedraaid om het zicht onder verschillende lichtomstandigheden te verbeteren. De filters zijn rood, groen en geel van kleur. Wanneer de periscoop in gebruik is, is een dubbel rubberen oculair aangebracht. Eén zijde van het oculair is afgeschermd, en er wordt eigenlijk maar één oog gebruikt. Het oculair is omkeerbaar, zodat de kapitein zijn dominante oog kan gebruiken. (Naast rechts- of linkshandig zijn mensen ook rechts- of linksgeoriënteerd, hoewel de meesten waarschijnlijk geen idee hebben welk.)
Het buitenste deel van de linker handgreep draait, waardoor het bovenste prisma omhoog of omlaag kan worden gebracht. De knop op het binnenste deel van het handvat is een grendel. Hierdoor kan de draaibare handgreep in vooraf ingestelde posities worden geklikt, zodat de kapitein door met het prisma op volle hoogte te beginnen en na een volledige horizonwaartse slag naar de volgende arretering te gaan, het prisma op het gevoel in de volgende positie kan laten zakken. Drie volledige vegen bestrijken alle posities.
De rechter hendel regelt de optische kracht van de periscoop, die optisch ook een telescoop is. De lage stand is 1,5 vermogen, en de hoge stand is 6 vermogen.
De knop onder de rechter hendel is de stadimeter controle. De stadimeter is een afstandsmeetinstrument, dat de kapitein in staat stelt zijn aanval uit te zetten met een veel grotere nauwkeurigheid dan simpelweg proberen te raden hoe ver weg het doel zich bevindt. De afstand tot het doel, in yards, wordt afgelezen op de grote zwarte wijzerplaat aan de onderkant van de periscoop. Deze wijzerplaat is aan de achterkant van de periscoop dubbel aangebracht, zodat de afstand ook door de naderingsofficier kan worden afgelezen zonder dat de kapitein zijn oog van het oculair hoeft te halen. Ook aan de achterkant van de periscoop, in de hefkraag, bevindt zich de lagerring. Wanneer de periscoop rechtstreeks op de boeg van de onderzeeër is gericht, is de peiling nul, omdat de peiling wordt gegeven ten opzichte van de koers van de onderzeeër.
Doelpeiling moet niet worden verward – zoals in een aantal films en televisieshows is gebeurd – met “hoek op de boeg”. Doellager is de relatieve peiling van de onderzeeër naar het doel. De hoek op de boeg is de hoek waaronder het doel de onderzeeër kruist, nadert, of zich verwijdert van de onderzeeër. Als het doel rechtstreeks op de onderzeeër afkoerst, is de hoek op de boeg nul. Als het doel rechtstreeks weg van de onderzeeër koerst, is de hoek op de boeg één-acht-nul. (Loodlijnen en snelheid worden altijd gegeven als enkele cijfers voor de duidelijkheid.) Als het doel kruist in een rechte hoek van rechts naar links hoek op de boeg is bakboord 90 °. In wezen is de hoek op de boeg de peiling naar de onderzeeboot vanaf het doel.
Deze afbeelding toont het zicht door de periscoop met de stadimeter in gebruik. Een gesplitst prisma wordt gebruikt om een tweede beeld van het doel over het eigenlijke beeld te leggen. De kapitein stelt het prisma 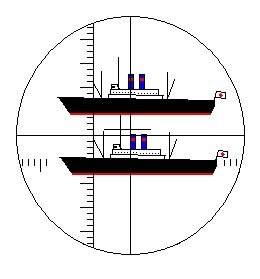 zo af dat de waterlijn van het tweede beeld op de masttop van het eigenlijke doelbeeld komt te liggen. De hoogte van de masttop vanaf het water wordt ingevoerd op de wijzerplaat, en de meting wordt verkregen. De stadimeter meet in feite hoeken, geen afstanden. Als de masttophoogte nauwkeurig wordt ingevoerd, zal het bereik juist zijn. Als u de masttophoogte verkeerd invoert, krijgt u een onjuist bereik. (Hetzelfde principe wordt gebruikt door landmeters, hoewel zij het voor de hand liggende voordeel hebben dat zij hun reikwijdten baseren op een gegradueerde paal van bekende lengte die wordt vastgehouden door een assistent). In de praktijk werden de meest nauwkeurige reikwijdtes altijd tijdens oefeningen verkregen, omdat de onderzeeërs opereerden tegen eenheden van hun eigen vloot en de masttophoogten altijd bekend waren. Bij vijandelijke oorlogsschepen en vrachtschepen was het vaak een beetje gissen, hoewel de herkenningsboeken de masttophoogten vermeldden wanneer deze bekend waren.
zo af dat de waterlijn van het tweede beeld op de masttop van het eigenlijke doelbeeld komt te liggen. De hoogte van de masttop vanaf het water wordt ingevoerd op de wijzerplaat, en de meting wordt verkregen. De stadimeter meet in feite hoeken, geen afstanden. Als de masttophoogte nauwkeurig wordt ingevoerd, zal het bereik juist zijn. Als u de masttophoogte verkeerd invoert, krijgt u een onjuist bereik. (Hetzelfde principe wordt gebruikt door landmeters, hoewel zij het voor de hand liggende voordeel hebben dat zij hun reikwijdten baseren op een gegradueerde paal van bekende lengte die wordt vastgehouden door een assistent). In de praktijk werden de meest nauwkeurige reikwijdtes altijd tijdens oefeningen verkregen, omdat de onderzeeërs opereerden tegen eenheden van hun eigen vloot en de masttophoogten altijd bekend waren. Bij vijandelijke oorlogsschepen en vrachtschepen was het vaak een beetje gissen, hoewel de herkenningsboeken de masttophoogten vermeldden wanneer deze bekend waren.
Aanvalsprocedure
Als een onderzeeboot eenmaal een doelwit heeft gevonden, is de nadering en aanval in wezen een oefening in geometrie. De kapitein moet de precieze hoek bepalen waaronder hij zijn torpedo moet afvuren, zodat deze het doel zal raken.
In stationaire objecten is dit gemakkelijk. Je richt de torpedo gewoon recht op het doel en zolang hij in een rechte lijn vliegt, zal hij het raken. Het probleem hierbij is natuurlijk dat noch de onderzeeër, noch het doel waarschijnlijk echt stil ligt. Met de zeldzame uitzondering van aanvallen op voor anker liggende schepen – de aanval van Prien op de HMS Royal Oak in Scapa Flow is misschien wel het bekendste voorbeeld – komen onderzeeboten hun doelwitten gewoonlijk op zee tegen, waar zowel de onderzeeboot als het doelwit vrijwel zeker in beweging zijn.
In deze situatie kun je niet schieten op waar het doelwit is. In plaats daarvan moet je schieten op de plaats waar het doelwit zich zal bevinden wanneer de torpedo het bereikt.
Bearing
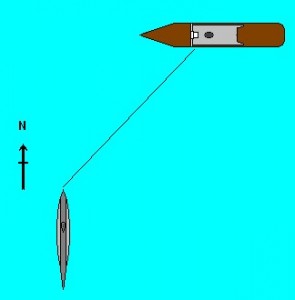 In deze grafiek is de nadering begonnen. De onderzeeër beweegt zich naar het noorden met 2 knopen. Het doelwit beweegt zich met 6 knopen naar het westen en bevindt zich momenteel ten oosten van de baan van de onderzeeër, op een afstand van vier zeemijl. (Om alles in de grafiek te passen zijn de afstanden en de afmetingen van de vaartuigen niet op schaal. Ook is de onderzeeër aan de oppervlakte afgebeeld voor de duidelijkheid- hij zou onder water zijn als dit werkelijk gebeurde.
In deze grafiek is de nadering begonnen. De onderzeeër beweegt zich naar het noorden met 2 knopen. Het doelwit beweegt zich met 6 knopen naar het westen en bevindt zich momenteel ten oosten van de baan van de onderzeeër, op een afstand van vier zeemijl. (Om alles in de grafiek te passen zijn de afstanden en de afmetingen van de vaartuigen niet op schaal. Ook is de onderzeeër aan de oppervlakte afgebeeld voor de duidelijkheid- hij zou onder water zijn als dit werkelijk gebeurde.
Eerst centreert de kapitein het dradenkruis van de periscoop op het midden van het doel, of op het punt op de romp waar hij wil dat de torpedo geraakt wordt, en roept: “Peiling.” Op het moment dat hij het doel precies in het midden heeft, roept hij vervolgens, “Mark!”
De naderingsofficier leest de peiling af van de peilingring die zich op de periscoopschacht bevindt. Deze peiling geeft de relatieve hoek aan tussen de onderzeeër en het doel. In dit geval, 45°. Voor de duidelijkheid kondigt de naderingsofficier de peiling aan als, “peiling-nul-vier-vijf”. (Doellagers worden altijd gegeven als drie getallen, en de cijfers worden altijd afzonderlijk gegeven. “Nul-vier-vijf” zal minder snel verkeerd worden begrepen dan “vijfenveertig graden”. Dit is vooral zo omdat uitkijkposten koersen afroepen als “stuurboord vier-vijf”, waarbij twee cijfers worden gebruikt en altijd wordt verwezen naar de zijde van het schip waar de waarneming plaatsvindt. Sommige marines gebruiken “rood” voor bakboord en “groen” voor stuurboord bij het maken van waarnemingsrapporten, omdat dit de kleuren zijn van de navigatielichten aan die zijden.)
Wanneer de peiling van het doel eenmaal is bepaald, wordt deze ingevoerd in de Torpedo Data Computer (TDC). Dit is een zeer geavanceerde electro-mechanische analoge computer. Tijdens de Tweede Wereldoorlog werden twee basistypen gebruikt. In de meeste marines was de TDC alleen een hoekoplosser, die de juiste gyro-instelling voor de torpedo gaf op basis van de gegevens die waren ingevoerd op het moment van de meting, of op een bepaald tijdstip in de toekomst, op basis van de beste schatting van de kapitein van waar het doel zich zou bevinden. De Amerikaanse versie voegde een positiebepaler toe, die in staat was de koers van het doelwit in real time te volgen. Dit was een belangrijke vooruitgang ten opzichte van de oudere systemen en zorgde voor veel nauwkeurigere doeloplossingen door het meeste giswerk te elimineren.
De TDC zal altijd de koers en snelheid van de onderzeeër kennen, omdat deze voortdurend worden bijgewerkt vanuit het hoofdgyrokompas en het Pitometer-logboek. (Dit logboek is overigens de snelheidsmeter van de onderzeeër, en niet het boek dat de kapitein gebruikt om de dagelijkse gebeurtenissen bij te houden). De TDC heeft nu ook de koers van het doel, maar nog steeds niet genoeg informatie om een doeloplossing uit te werken.
Bereik tot doel
Nu moet de kapitein het bereik tot het doel bepalen. Om dit te doen, moet hij eerst weten wat het doel is. Kijkend door de periscoop kan hij zien dat het een groot vrachtschip is. Onderzeeërs hebben herkenningsboeken waarin elk vijandelijk oorlogsschip en koopvaarder waarover informatie beschikbaar is, staat vermeld. Bij het doorbladeren van dit boek vindt de kapitein de Oyama Maru, een Japans vrachtschip van 4.750 ton, dat het schip lijkt te zijn dat hij in zijn periscoop heeft. Aangezien het midden 1944 is, en de Tweede Wereldoorlog woedt, besluit hij dat dit een legitiem doelwit is, dus gaat hij door met de nadering.
Nu hij de identiteit van het doelwit kent – of althans meent te kennen -, zoekt hij de masttophoogte op. Dit is de afstand van de waterlijn tot het hoogste punt op het schip. Volgens het herkenningsboek is dit 100 voet. Dit getal wordt ingevoerd in de stadimeter in de periscoop.
Het bereik kan ook worden bepaald door de actieve sonar te gebruiken op de single-ping instelling. Dit is een van de twee meest nauwkeurige methoden, omdat het niet afhankelijk is van het kennen van de masttophoogte van het doelwit. Amerikaanse onderzeeërs uit de late oorlog bouwden ook een kleine radarantenne in de zoekperiscoop in, die ook een exact bereik zou geven, met het risico meer nevel op te werpen dan de dunnere aanvalsperiscoop.
Deze grafiek toont wat de kapitein ziet door de stadimeter van de periscoop. Een gesplitst prisma wordt gebruikt om een spookbeeld van het doel zo te plaatsen dat de waterlijn precies boven de masttop van het “ware” beeld zit. De stadimeter registreert in feite de hoek boven de horizontaal ten opzichte van de masttop, niet de afstand. Er wordt dan wat elementaire wiskunde uitgevoerd die die hoek vertaalt in een afstandscijfer.
De manier waarop dit werkt is dat, gezien vanaf een bepaalde afstand, een object van een bepaalde hoogte zich onder een bepaalde hoek zal bevinden. Als u weet dat de gezichtshoek bijvoorbeeld 1° is, en het voorwerp is 100 voet hoog, dan kunt u berekenen dat de gezichtshoek en de top van het voorwerp elkaar slechts zullen raken op een afstand van één zeemijl. De stadimeter doet eenvoudig het rekenwerk voor U.
Een nadeel hiervan is natuurlijk, dat de nauwkeurigheid geheel afhankelijk is van het weten van de juiste hoogte van het object. (In ons voorbeeld – maar niet in de afbeelding, waar het schip aanzienlijk dichterbij is dan in een waarheidsgetrouw beeld – blijkt de masttophoogte 1/4° boven het horizontale vlak te zijn. Met de formule R=h/tan(q) betekent dit dat het doel zich op vier zeemijl van de onderzeeër bevindt. De stadimeter doet dit intern, zonder dat de kapitein of de naderingsofficier het hoeft te berekenen, en geeft aan dat het doel 8.100 yards weg is.
Dit getal wordt afgelezen van een wijzerplaat aan de voet van de periscoop en ingevoerd in de TDC, waarmee een ander deel van de oplossing wordt gegeven.
Hoek op de boeg
Om een schietoplossing te kunnen uitwerken, moet de kapitein ook de hoek op de boeg voor het doel weten. Dit is niet hetzelfde als de peiling van het doel, ondanks wat je zou kunnen denken uit sommige films en romans. De peiling van het doel vertelt je waar het doel zich bevindt ten opzichte van de onderzeeër. De hoek op de boeg vertelt je waar je bent gezien – wat je natuurlijk niet hoopt te zijn – vanaf het doelwit.
In ons voorbeeld, waar het doelwit van oost naar west direct over de boeg van de onderzeeër vaart, is de hoek op de boeg bakboord 90°. Dat wil zeggen, de bakboord (linker) zijde van het doelwit is in de richting van de onderzeeër, en het staat in een hoek van 90° ten opzichte van de koers van de onderzeeër. Indien het doelwit rechtstreeks op de onderzeeër afkomt, zou de hoek op de boeg nul zijn. Als het rechtstreeks wegging, zou de hoek op de boeg 180° zijn. Als het doelwit een zuidwestelijke koers had, zou de hoek op de boeg bakboord 45° zijn, enz.
Target snelheid
De laatste factor die nodig is, is de snelheid van het doelwit. Er zijn verschillende methoden om deze te verkrijgen, hoewel geen enkele echt 100% nauwkeurig kan worden genoemd.
Eerst, periscoopwaarneming. De periscoopoptiek is gemarkeerd in graden in zowel de verticale als de horizontale as. Als de afstand tot het doel bekend is, is het mogelijk de snelheid te bepalen door de tijd te meten die nodig is om een bepaald aantal graden af te leggen. Het probleem met deze methode is natuurlijk dat het afhankelijk is van een nauwkeurig bereik, omdat je de tijd meet die het doel nodig heeft om een bekend aantal graden af te leggen, en het betekent ook dat je de periscoop moet blootstellen terwijl je dit doet, wat potentieel gevaarlijk is als de vijand het opmerkt. (Japanse koopvaarders hadden niet alleen dekgeschut, vaak met geschutbemanningen die wisten wat ze deden, maar ook dieptebommen, en aarzelden niet om die te gebruiken.)
Tweede, algemene kennis. Van sommige scheepstypen is bekend dat ze routinematig met bepaalde snelheden varen. Dit zal meestal de meest economische kruissnelheid zijn. Maar omdat de kapitein van het doelwit gehaast kan zijn, of langzamer vaart dan gewoonlijk, is dit meestal de minst nauwkeurige methode om de snelheid te bepalen. Een ervaren kapitein kan vaak vrij nauwkeurig de snelheid van een doelwit inschatten aan de hand van de boeggolf. (Een van de dingen waartoe camouflagepatronen voor oorlogsschepen dienen, is het de vijand moeilijk te maken om de boeggolf duidelijk te kunnen zien.)
Derde, het tellen van omwentelingen. De sonaroperator kan luisteren naar het geluid van de propellers van het doelwit en het aantal omwentelingen per minuut bepalen. Indien de kapitein van de onderzeeër de spoed (de afstand afgelegd in één omwenteling) van de propellers van het doelwit kent, kan hij een vrij nauwkeurige schatting maken van de snelheid. Bijvoorbeeld, een schroef met een spoed van 24 voet zou het schip bij elke omwenteling 24 voet vooruit moeten brengen. Honderd omwentelingen per minuut zouden het schip dus 2.400 voet, of 800 yards, vooruit moeten brengen. Dit zou een ruwe afgelegde afstand geven van 1 zeemijl (2.025 yards) elke 2-1/2 minuut of een snelheid van ongeveer 23,7 knopen. Een dergelijke snelheid wijst in het algemeen op een groot oorlogsschip of een lijnschip. Vrachtschepen waren gewoonlijk trager, met de snelste over het algemeen beperkt tot ongeveer 16 knopen. (Brandstofbesparing was de belangrijkste factor – snelle schepen verbruiken veel brandstof, dus hoge snelheden werden meestal aangetroffen in passagiersschepen, waar de lijn extra kon rekenen voor een snelle overtocht, gespecialiseerde vrachtschepen zoals bananenboten, die hun lading moesten afleveren voordat deze bedierf, en oorlogsschepen, waar kosten geen belangrijke overweging waren. In ieder geval, als de spoed van de schroeven bekend is, en een nauwkeurige telling kan worden verkregen, kan dit een vrij goede snelheidsschatting opleveren. Bovendien zijn de schroeven van een schip verre van 100% efficiënt – de enige schepen die dit voor elkaar krijgen zijn onderzeeërs op aanzienlijke diepte, waar de grote zeedruk zog en cavitatie onderdrukt.)
Wanneer de snelheid van het doelwit is vastgesteld, wordt dit ook in de TDC ingevoerd. Op dit punt wacht iedereen een paar minuten en doet dan nog een waarneming. Als alle gegevens juist waren, zal het doel zijn waar de positiebepaler van de TDC het voorspelt. Is dat niet het geval, dan worden meer waarnemingen gedaan en correcties in de TDC ingebracht. Verscheidene waarnemingen over een periode van 10 tot 15 minuten zou de fout moeten elimineren – of op zijn minst verminderen tot het punt waar een treffer waarschijnlijker is dan een misser.
Terwijl de TDC deze oplossingen uitwerkt, worden de gyro-hoeken die het genereert automatisch geprogrammeerd in de torpedo’s. De gyroscopische geleiding maakt het mogelijk de torpedo in te stellen om een bepaalde koers te varen, in plaats van de onderzeeër te moeten richten op de plaats waar de kapitein de torpedo heen wil hebben, wat nodig was bij de eerste torpedo ontwerpen, die alleen in een rechte lijn konden varen.
Terwijl dit alles gaande is, wordt ook de diepte van de torpedoloop ingesteld. Voor dit specifieke doel, dat een beladen diepgang heeft van 38 voet, wordt de torpedo ingesteld op een diepte van 25 voet, zodat hij ruim onder de waterlijn zal exploderen. Als een magnetische zekering wordt gebruikt – wat zo laat in de Tweede Wereldoorlog niet het geval zou zijn geweest, omdat tegen die tijd zelfs het Bureau of Ordinance eindelijk had erkend dat ze onbetrouwbaar waren onder veldomstandigheden – dan zou de loopdiepte worden ingesteld op 43 voet, zodat de kernkop direct onder de kiel zou ontploffen, waar hij de meeste schade zou aanrichten.
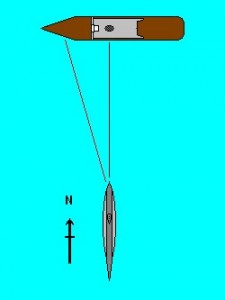 Deze afbeelding toont de onderzeeër en het doelwit op het moment dat een oplossing is uitgewerkt en de kapitein klaar is om een torpedo af te vuren. (In de praktijk zou hij er waarschijnlijk minstens twee afvuren.) Het doelwit bevindt zich nu recht voor de onderzeeër, op een afstand van 1.400 meter. Met een snelheid van 46 knopen zal de Mark 14 torpedo één minuut nodig hebben om die afstand af te leggen. In die minuut zal het schip een tiende van een zeemijl vooruit zijn gegaan, of ongeveer 200 yards.
Deze afbeelding toont de onderzeeër en het doelwit op het moment dat een oplossing is uitgewerkt en de kapitein klaar is om een torpedo af te vuren. (In de praktijk zou hij er waarschijnlijk minstens twee afvuren.) Het doelwit bevindt zich nu recht voor de onderzeeër, op een afstand van 1.400 meter. Met een snelheid van 46 knopen zal de Mark 14 torpedo één minuut nodig hebben om die afstand af te leggen. In die minuut zal het schip een tiende van een zeemijl vooruit zijn gegaan, of ongeveer 200 yards.
Met andere woorden, als de torpedo recht vooruit wordt afgevuurd, zal het doel er niet meer zijn als de torpedo aankomt en de torpedo zal achteruit passeren. De berekeningen van de TDC houden hier rekening mee en stellen de torpedo in op een relatieve koers van 350°. Dit betekent dat de torpedo onder een zodanige hoek vaart, dat zijn relatieve peiling ten opzichte van het doel constant blijft. Twee objecten die een constante koers aanhouden in een kruisende situatie zullen elkaar uiteindelijk raken. Door de torpedo het doel te laten “leiden”, zou hij dicht bij het midden van het doel moeten raken en een goede kans hebben om het tot zinken te brengen.
Als de torpedo’s zijn afgevuurd, kan de onderzeeër in de buurt blijven om het resultaat te observeren. Of, als er escorteschepen bij het doelwit zijn, kan het verstandiger zijn om te proberen weg te glippen en te luisteren naar eventuele treffers op de hydrofoons. Dit laatste heeft het nadeel dat het moeilijk is het tot zinken brengen te bevestigen, maar heeft ook het voordeel dat de kans groter is dat de onderzeeboot het overleeft om met de eer te strijken.