Da ein U-Boot angreifen kann, während es unter Wasser versteckt ist, braucht es eine einzigartige Lösung, um den Feind zu verfolgen, und hier kommt das U-Boot-Periskop ins Spiel. Die frühen Entwürfe des U-Boot-Periskops, die im Zweiten Weltkrieg eingesetzt wurden, waren sehr einfach und bestanden im Wesentlichen aus zwei Teleskopen, die aufeinander gerichtet waren.
Der vielleicht größte Unterschied zwischen einem U-Boot und einem Überwasserkriegsschiff ist die bevorzugte Angriffsmethode. Während des Zweiten Weltkriegs waren die Überwasserschiffe darauf ausgelegt, mit schwerem Geschütz zu schießen. Zerstörer führten auch Torpedos mit sich, die normalerweise in einem Winkel von 90° zum Kurs des Zerstörers abgeschossen wurden. Flugzeugträger setzten Flugzeuge und Bomben im Wesentlichen auf die gleiche Weise ein wie Schlachtschiffe und Kreuzer ihre Geschütze, wenn auch natürlich mit wesentlich größerer Reichweite und Leistung.
U-Boote griffen im Allgemeinen unter Wasser an. U-Boote sind normalerweise anfälliger für Schäden als Überwasserkriegsschiffe. Wenn ein U-Boot gepanzert ist, dann meist um den Kommandoturm und die Brücke herum und zum Schutz vor leichtkalibrigen Waffen wie Maschinengewehren oder vor Granatsplittern. Überwasser-Kriegsschiffe verfügen in der Regel über einen umfangreicheren Panzerungsschutz. Für ein U-Boot besteht der Hauptschutz nicht in schweren Stahlplatten, sondern in der Möglichkeit, unter der Oberfläche zu operieren, wo der Feind es nicht finden und beschießen kann.
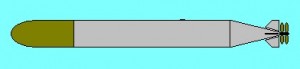
Die Hauptwaffe eines militärischen U-Boots ist der Torpedo. Im Zweiten Weltkrieg war der gängigste Typ ein 21-Zoll-Torpedo (533 mm), der entweder von einer kleinen „Dampf“-Turbine oder von Elektromotoren und Batterien angetrieben wurde. Die elektrischen Torpedos wurden oft als „wackelfrei“ bezeichnet, da sie nicht die sichtbare Spur von Abgasblasen hinterließen, die für die Dampftorpedos charakteristisch war. Die kaiserliche japanische Marine setzte einen 24-Zoll (610 mm) „Sauerstoff“-Torpedo ein. Dieser „Long Lance“-Torpedo, der einen 1.000-Pfund-Sprengkopf trug – fast doppelt so viel Sprengkraft wie die Torpedos anderer Marinen – wurde allgemein als der effektivste Torpedo anerkannt, der je gebaut wurde, was die Nützlichkeit als Schiffskiller betraf.
 Damit ein getauchtes Marine-U-Boot ein feindliches Schiff versenken konnte, musste es eine Möglichkeit haben, die Torpedos zu richten. Die verschiedenen Marinen entwickelten unterschiedliche Methoden. In der Zwischenkriegszeit bevorzugte die US-Doktrin den Einsatz von Sonar zur Bestimmung von Zielentfernung, -peilung und -winkel. Man ging davon aus, dass es aufgrund der Fortschritte im Bereich der Detektion und der Waffen zur U-Boot-Bekämpfung selbstmörderisch war, bei Tageslicht ein Periskop zu benutzen. Zu diesem Zweck installierte die US-Marine in ihren U-Booten hochmoderne Sonar- und Hydrophonanlagen sowie Torpedo-Datencomputer, die bis weit nach Kriegsende wesentlich fortschrittlicher waren als alles, was in anderen Marinen verwendet wurde.
Damit ein getauchtes Marine-U-Boot ein feindliches Schiff versenken konnte, musste es eine Möglichkeit haben, die Torpedos zu richten. Die verschiedenen Marinen entwickelten unterschiedliche Methoden. In der Zwischenkriegszeit bevorzugte die US-Doktrin den Einsatz von Sonar zur Bestimmung von Zielentfernung, -peilung und -winkel. Man ging davon aus, dass es aufgrund der Fortschritte im Bereich der Detektion und der Waffen zur U-Boot-Bekämpfung selbstmörderisch war, bei Tageslicht ein Periskop zu benutzen. Zu diesem Zweck installierte die US-Marine in ihren U-Booten hochmoderne Sonar- und Hydrophonanlagen sowie Torpedo-Datencomputer, die bis weit nach Kriegsende wesentlich fortschrittlicher waren als alles, was in anderen Marinen verwendet wurde.
Tatsächlich erwiesen sich Sonarangriffe unter Wasser unter tatsächlichen Kriegsbedingungen als bemerkenswert unwirksam. Die US-Marine verfiel einem der häufigsten militärischen Irrtümer, indem sie eine Theorie entwickelte und dann die Testergebnisse durch die Brille dieser Theorie betrachtete. Alle Ergebnisse, die die Theorie zu bestätigen schienen, wurden begeistert aufgenommen, während Ergebnisse, die die Theorie nicht bestätigten, auf „Bedienungsfehler“ zurückgeführt wurden. Diese Tendenz setzte sich bis weit in den Krieg hinein fort und ging so weit, dass eine Reihe von Kommandanten wegen „mangelnder Aggressivität“ abgelöst wurden, obwohl das eigentliche Problem darin bestand, dass die Torpedos, die sie abfeuerten, nicht funktionierten. (Das Bureau of Ordinance sagte, dass die Torpedos funktionierten, und da sie sich unmöglich irren konnten, musste es an den Kommandanten liegen.)
Während die amerikanischen Oberbefehlshaber die Torpedoprobleme noch einige Zeit übersehen haben, wurde der Sonarangriff unter Wasser sehr schnell beseitigt, sobald der Krieg begann. Die Kapitäne 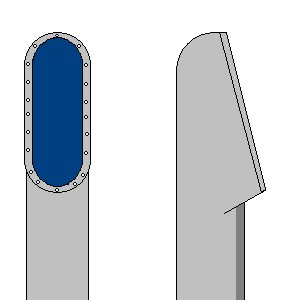 erkannten zwei Tatsachen. Erstens, sie trafen mit Sonar allein nichts. Und zweitens war es, solange man vorsichtig war, viel schwieriger, den Kopf des Angriffsperiskops zu sehen, als die Theoretiker glaubten. Der obere Teil des Optronikmastes wurde so schlank wie möglich gebaut, um die Sichtbarkeit zu verringern. Die einschränkenden Faktoren waren die Größe der oberen Linse, die groß genug sein musste, um einen guten Betrieb bei Tageslicht zu gewährleisten, sowie das obere Prisma und sein Ausrichtungsmechanismus. Das obere Prisma konnte vom Turm aus gekippt werden, um das Sichtfeld für die Luftsuche zu vergrößern, oder es konnte heruntergedrückt werden, um aus der Nähe zu sehen.
erkannten zwei Tatsachen. Erstens, sie trafen mit Sonar allein nichts. Und zweitens war es, solange man vorsichtig war, viel schwieriger, den Kopf des Angriffsperiskops zu sehen, als die Theoretiker glaubten. Der obere Teil des Optronikmastes wurde so schlank wie möglich gebaut, um die Sichtbarkeit zu verringern. Die einschränkenden Faktoren waren die Größe der oberen Linse, die groß genug sein musste, um einen guten Betrieb bei Tageslicht zu gewährleisten, sowie das obere Prisma und sein Ausrichtungsmechanismus. Das obere Prisma konnte vom Turm aus gekippt werden, um das Sichtfeld für die Luftsuche zu vergrößern, oder es konnte heruntergedrückt werden, um aus der Nähe zu sehen.
Wenn der Periskopkonstrukteur – und die Marine, die ihn beschäftigte – bereit war, auf die Luftsuchfunktion zu verzichten und ein Periskop mit einem festen Kopf zu bauen, konnte der Durchmesser recht klein sein. In manchen Fällen betrug er nicht viel mehr als 1/2 Zoll. Das Standard-Angriffsperiskop, das in amerikanischen Marine-U-Booten verwendet wurde, hatte am oberen Ende einen Durchmesser von 1-1/4 Zoll. Such- oder „Nacht“-Periskope haben einen größeren Kopf, um die Lichtsammelfähigkeit zu erhöhen. Amerikanische Suchperiskope aus der Spätphase des Krieges enthielten einen Radarwellenleiter im Kopf.
Ein gängiger Begriff ist die Periskoptiefe, die als die Tiefe definiert ist, die benötigt wird, um das Periskop über die Wasseroberfläche hinaus auszuziehen.
Bedienelemente des Periskops
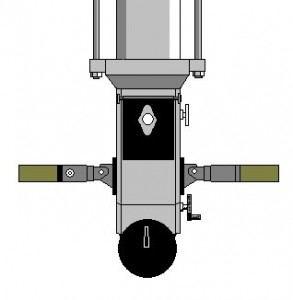 Das Bild links zeigt eine vereinfachte Ansicht des Okulars und der Bedienelemente eines Kollmorgen-Angriffsperiskops, ähnlich dem Typ, der in den meisten Angriffs-U-Booten der amerikanischen Flotte während des Zweiten Weltkriegs verwendet wurde. Die Hauptwelle des Periskops ruht auf Kugellagern in der schweren Hebemanschette an der Oberseite. Die beiden an der Manschette befestigten Hubstangen führen zu Hydraulikzylindern, die sich in den Periskopscheren oberhalb des Kommandoturms befinden. Um das Periskop anzuheben, wird Hydraulikdruck auf die Unterseite der Kolben in den Zylindern ausgeübt. Um das Periskop abzusenken, fließt die Hydraulikflüssigkeit aus den Zylindern zurück in den Behälter. Sobald der hydraulische Druck nachlässt, senkt sich das Periskop durch die Schwerkraft.
Das Bild links zeigt eine vereinfachte Ansicht des Okulars und der Bedienelemente eines Kollmorgen-Angriffsperiskops, ähnlich dem Typ, der in den meisten Angriffs-U-Booten der amerikanischen Flotte während des Zweiten Weltkriegs verwendet wurde. Die Hauptwelle des Periskops ruht auf Kugellagern in der schweren Hebemanschette an der Oberseite. Die beiden an der Manschette befestigten Hubstangen führen zu Hydraulikzylindern, die sich in den Periskopscheren oberhalb des Kommandoturms befinden. Um das Periskop anzuheben, wird Hydraulikdruck auf die Unterseite der Kolben in den Zylindern ausgeübt. Um das Periskop abzusenken, fließt die Hydraulikflüssigkeit aus den Zylindern zurück in den Behälter. Sobald der hydraulische Druck nachlässt, senkt sich das Periskop durch die Schwerkraft.
Der Knopf an der oberen rechten Seite des Periskops dient zur Einstellung des Fokus. Die schwarze Platte, in deren oberer Hälfte sich das Okular befindet, ist die Strahlenfiltereinheit. Sie enthält eine Scheibe mit drei farbigen – und einem klaren – Filter, die vor dem Okular gedreht werden können, um die Sicht bei unterschiedlichen Lichtverhältnissen zu verbessern. Die Filter sind rot, grün und gelb gefärbt. Wenn das Periskop in Gebrauch ist, wird ein doppeltes Gummiokular angebracht. Eine Seite des Okulars ist verdeckt, so dass nur ein Auge tatsächlich benutzt wird. Das Okular ist umkehrbar, damit der Kapitän sein dominantes Auge benutzen kann. (Menschen sind nicht nur Rechts- oder Linkshänder, sondern auch Rechts- oder Linkshänder, obwohl die meisten wahrscheinlich nicht wissen, welches Auge sie benutzen.)
Der äußere Teil des linken Griffs ist drehbar, so dass das obere Prisma angehoben oder abgesenkt werden kann. Der Knopf am inneren Teil des Griffs ist eine Arretierung. Damit lässt sich der Drehgriff in voreingestellte Positionen einrasten, so dass der Kapitän das Prisma nach einem vollständigen Überstreichen des Horizonts nach Gefühl in die nächste Position absenken kann, wenn er mit dem Prisma in voller Höhe beginnt und zur nächsten Raste fährt. Drei vollständige Durchläufe decken alle Positionen ab.
Mit dem rechten Griff wird die optische Leistung des Periskops eingestellt, das optisch auch ein Fernrohr ist. Die niedrige Einstellung ist 1,5 und die hohe Einstellung ist 6.
Der Knopf unter dem rechten Griff ist die Stadimetersteuerung. Der Stadimeter ist ein Entfernungsmesser, der es dem Kapitän ermöglicht, seinen Angriff mit viel größerer Genauigkeit zu planen, als wenn er einfach nur versucht, die Entfernung des Ziels zu schätzen. Die Entfernung zum Ziel in Yards wird auf der großen schwarzen Skala am unteren Ende des Periskops abgelesen. Diese Skala ist auf der Rückseite des Periskops doppelt vorhanden, so dass die Ablesung auch vom Anflugoffizier vorgenommen werden kann, ohne dass der Kapitän sein Auge vom Okular nehmen muss. Ebenfalls auf der Rückseite des Periskops, in der Hebevorrichtung, befindet sich der Lagerring. Wenn das Periskop direkt auf den Bug des U-Bootes gerichtet ist, ist die Peilung Null, da die Zielpeilung relativ zum Kurs des U-Bootes angegeben wird.
Die Zielpeilung sollte nicht – wie in vielen Filmen und Fernsehsendungen geschehen – mit dem „Winkel am Bug“ verwechselt werden. Die Zielpeilung ist die relative Peilung vom U-Boot zum Ziel. Der Winkel auf dem Bug ist der Winkel, in dem das Ziel das U-Boot kreuzt, sich ihm nähert oder sich von ihm entfernt. Wenn das Ziel direkt auf das U-Boot zusteuert, ist der Winkel am Bug gleich Null. Bewegt es sich direkt von ihm weg, ist der Winkel am Bug eins acht null. (Peilung und Geschwindigkeit werden der Übersichtlichkeit halber immer als einzelne Ziffern angegeben.) Wenn das Ziel im rechten Winkel von rechts nach links kreuzt, beträgt der Winkel am Bug Backbord 90°. Im Wesentlichen ist der Winkel am Bug die Peilung zum U-Boot vom Ziel aus.
Dieses Bild zeigt den Blick durch das Periskop mit dem Stadimeter im Einsatz. Ein geteiltes Prisma wird verwendet, um ein zweites Bild des Ziels über das eigentliche Bild zu legen. Der Kapitän stellt das Prisma 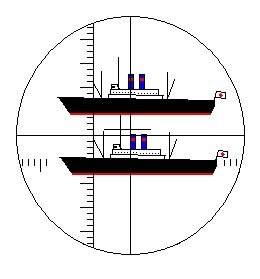 so ein, dass die Wasserlinie des zweiten Bildes auf die Mastspitze des eigentlichen Zielbildes ausgerichtet ist. Die Höhe der Mastspitze über dem Wasser wird auf dem Zifferblatt eingegeben und der Wert abgelesen. Das Stadimeter misst den Winkel, nicht die Entfernung. Wenn die Höhe des Mastkopfes genau eingegeben wird, ist die Entfernung korrekt. Wird die Masthöhe falsch eingegeben, ergibt sich ein falscher Bereich. (Dasselbe Prinzip wird von Vermessungsingenieuren angewandt, obwohl sie den offensichtlichen Vorteil haben, dass sie ihre Entfernungen anhand eines Messstabs mit bekannter Länge ermitteln, der von einem Assistenten gehalten wird.) In der Praxis wurden die genauesten Entfernungen immer bei Übungen ermittelt, da die U-Boote gegen Einheiten der eigenen Flotte operierten und die Masthöhen immer bekannt waren. Bei feindlichen Kriegsschiffen und Frachtern musste man oft ein wenig raten, obwohl in den Erkennungsbüchern die Mastspitzenhöhen sorgfältig aufgelistet waren, wenn sie bekannt waren.
so ein, dass die Wasserlinie des zweiten Bildes auf die Mastspitze des eigentlichen Zielbildes ausgerichtet ist. Die Höhe der Mastspitze über dem Wasser wird auf dem Zifferblatt eingegeben und der Wert abgelesen. Das Stadimeter misst den Winkel, nicht die Entfernung. Wenn die Höhe des Mastkopfes genau eingegeben wird, ist die Entfernung korrekt. Wird die Masthöhe falsch eingegeben, ergibt sich ein falscher Bereich. (Dasselbe Prinzip wird von Vermessungsingenieuren angewandt, obwohl sie den offensichtlichen Vorteil haben, dass sie ihre Entfernungen anhand eines Messstabs mit bekannter Länge ermitteln, der von einem Assistenten gehalten wird.) In der Praxis wurden die genauesten Entfernungen immer bei Übungen ermittelt, da die U-Boote gegen Einheiten der eigenen Flotte operierten und die Masthöhen immer bekannt waren. Bei feindlichen Kriegsschiffen und Frachtern musste man oft ein wenig raten, obwohl in den Erkennungsbüchern die Mastspitzenhöhen sorgfältig aufgelistet waren, wenn sie bekannt waren.
Anlaufverfahren
Wenn ein U-Boot ein Ziel gefunden hat, ist die Annäherung und der Angriff im Wesentlichen eine Übung in Geometrie. Der Kapitän muss den genauen Winkel bestimmen, in dem er seinen Torpedo abfeuern muss, damit er das Ziel trifft.
Bei stationären Objekten ist das einfach. Man richtet den Torpedo einfach direkt auf das Ziel und solange er sich in einer geraden Linie bewegt, wird er es treffen. Das Problem dabei ist natürlich, dass weder das U-Boot noch das Ziel tatsächlich stationär sein dürften. Mit der seltenen Ausnahme von Angriffen auf verankerte Schiffe – Priens Angriff auf die HMS Royal Oak in Scapa Flow ist vielleicht das bekannteste Beispiel – treffen U-Boote ihre Ziele normalerweise auf See, wo sich sowohl das U-Boot als auch das Ziel mit ziemlicher Sicherheit bewegen.
In dieser Situation kann man nicht auf das Ziel schießen. Stattdessen muss man dorthin schießen, wo sich das Ziel befinden wird, wenn der Torpedo es erreicht.
Lager
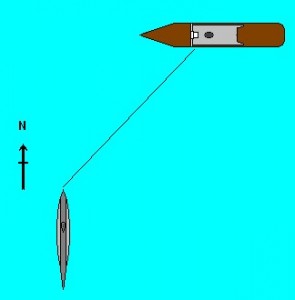 In dieser Grafik hat die Annäherung begonnen. Das U-Boot bewegt sich mit 2 Knoten nach Norden. Das Ziel bewegt sich mit 6 Knoten in westlicher Richtung und befindet sich derzeit östlich des U-Boot-Kurses, in einer Entfernung von vier nautischen Meilen. (Um alles in die Grafik zu integrieren, sind die Entfernungen und Größen der Schiffe nicht maßstabsgetreu. Außerdem ist das U-Boot zur Verdeutlichung aufgetaucht dargestellt – in der Realität wäre es getaucht.
In dieser Grafik hat die Annäherung begonnen. Das U-Boot bewegt sich mit 2 Knoten nach Norden. Das Ziel bewegt sich mit 6 Knoten in westlicher Richtung und befindet sich derzeit östlich des U-Boot-Kurses, in einer Entfernung von vier nautischen Meilen. (Um alles in die Grafik zu integrieren, sind die Entfernungen und Größen der Schiffe nicht maßstabsgetreu. Außerdem ist das U-Boot zur Verdeutlichung aufgetaucht dargestellt – in der Realität wäre es getaucht.
Zunächst richtet der Kapitän das Fadenkreuz des Periskops auf die Mitte des Ziels oder auf den Punkt an seinem Rumpf, an dem er den Torpedo treffen will, und ruft „Peilung“. In dem Moment, in dem er das Ziel genau zentriert hat, ruft er „Markieren!“
Der Anflugoffizier liest die Peilung am Peilring auf dem Periskopschaft ab. Diese Peilung gibt den relativen Winkel zwischen dem U-Boot und dem Ziel an. In diesem Fall sind es 45°. Der Klarheit halber sagt der Anflugoffizier die Peilung als „Peilung-Null-Vier-Fünf“ an. (Zielpeilungen werden immer als drei Zahlen angegeben, und die Ziffern werden immer getrennt angegeben. „Null-vier-fünf“ wird weniger leicht missverstanden als „fünfundvierzig Grad“. Dies gilt umso mehr, als Ausgucke Peilungen als „Steuerbord vier-fünf“ ausrufen, wobei sie zwei Ziffern verwenden und sich immer auf die Seite des Schiffes beziehen, auf der die Peilung erfolgt. Einige Marinen verwenden bei der Meldung von Sichtungen „rot“ für Backbord und „grün“ für Steuerbord, da dies die Farben der Navigationslichter auf diesen Seiten sind.)
Nachdem die Zielpeilung ermittelt wurde, wird sie in den Torpedo Data Computer (TDC) eingegeben. Dies ist ein hochentwickelter elektromechanischer Analogrechner. Während des Zweiten Weltkriegs wurden zwei Grundtypen verwendet. In den meisten Seestreitkräften war der TDC ein reiner Winkelrechner, der die korrekte Kreiselstellung für den Torpedo auf der Grundlage der zum Zeitpunkt der Messung eingegebenen Daten oder zu einem bestimmten Zeitpunkt in der Zukunft auf der Grundlage der besten Schätzung des Kapitäns, wo sich das Ziel befinden würde, ermittelte. Die amerikanische Version verfügte zusätzlich über einen Positionsanzeiger, der den Kurs des Ziels in Echtzeit verfolgen konnte. Dies war ein bedeutender Fortschritt gegenüber den älteren Systemen und ermöglichte viel genauere Ziellösungen, da der größte Teil des Ratespiels entfiel.
Der TDC kennt immer den Kurs und die Geschwindigkeit des U-Bootes, da diese ständig vom Hauptkreiselkompass und dem Pitometer-Log aktualisiert werden. (Dieses Logbuch ist übrigens der Geschwindigkeitsmesser des U-Boots und nicht das Buch, das der Kapitän benutzt, um die täglichen Ereignisse festzuhalten.) Der TDC hat jetzt auch die Zielpeilung, aber immer noch nicht genug Informationen, um eine Ziellösung zu berechnen.
Entfernung zum Ziel
Nun muss der Kapitän die Entfernung zum Ziel bestimmen. Dazu muss er zunächst wissen, was das Ziel ist. Ein Blick durch das Periskop zeigt ihm, dass es sich um einen großen Frachter handelt. U-Boote führen Erkennungsbücher mit sich, in denen alle feindlichen Kriegs- und Handelsschiffe aufgeführt sind, über die Informationen verfügbar sind. Bei der Durchsicht dieses Buches findet der Kapitän die Oyama Maru, einen 4.750 Tonnen schweren japanischen Frachter, der das Schiff zu sein scheint, das er im Periskop hat. Da es Mitte 1944 ist und der Zweite Weltkrieg tobt, beschließt er, dass dies ein legitimes Ziel ist, und fährt mit der Annäherung fort.
Nachdem er nun die Identität des Ziels kennt – oder zumindest glaubt, sie zu kennen -, sieht er sich die Masthöhe an. Das ist die Entfernung von der Wasserlinie bis zum höchsten Punkt des Schiffes. Dem Erkennungsbuch zufolge sind dies 100 Fuß. Diese Zahl wird in den Stadimeter im Periskop eingegeben.
Die Entfernung kann auch durch Verwendung des aktiven Sonars in der Single-Ping-Einstellung bestimmt werden. Dies ist eine der beiden genauesten Methoden, da sie nicht von der Kenntnis der Masthöhe des Ziels abhängt. Amerikanische U-Boote aus der Spätphase des Krieges bauten auch eine winzige Radarantenne in das Suchperiskop ein, die ebenfalls eine exakte Entfernungsbestimmung ermöglichte, auch auf die Gefahr hin, dass mehr Gischt aufgewirbelt wurde als bei dem dünneren Angriffsperiskop.
Diese Grafik zeigt, was der Kapitän durch den Stadimeter des Periskops sieht. Ein geteiltes Prisma wird verwendet, um ein Geisterbild des Ziels so zu platzieren, dass seine Wasserlinie genau auf der Oberkante der Mastspitze des „echten“ Bildes sitzt. Das Stadimeter registriert den Winkel über der Horizontalen zum Masttop, nicht die Entfernung. Dieser Winkel wird dann in eine Entfernungsangabe umgerechnet.
Das funktioniert so, dass ein Objekt mit einer bestimmten Höhe aus einer bestimmten Entfernung betrachtet in einem bestimmten Winkel steht. Wenn man zum Beispiel weiß, dass der Sichtwinkel 1° beträgt und das Objekt 100 Fuß hoch ist, kann man berechnen, dass sich der Sichtwinkel und die Spitze des Objekts erst in einer Entfernung von einer Seemeile berühren werden. Das Stadimeter rechnet einfach für Sie.
Ein Nachteil dabei ist natürlich, dass die Genauigkeit vollständig davon abhängt, dass man die richtige Höhe des Objekts kennt. (In unserem Beispiel – aber nicht in der Grafik, in der das Schiff wesentlich näher ist, als es in einer echten Ansicht sein würde – stellt sich heraus, dass die Masthöhe 1/4° über der Horizontalen liegt. Nach der Formel R=h/tan(q) bedeutet dies, dass das Ziel vier Seemeilen vom U-Boot entfernt ist. Das Stadimeter macht dies intern, ohne dass der Kapitän oder der Annäherungsoffizier es berechnen muss, und zeigt an, dass das Ziel 8.100 Yards entfernt ist.
Diese Zahl wird von einer Skala an der Basis des Periskops abgelesen und in den TDC eingegeben, was einen weiteren Teil der Lösung liefert.
Winkel am Bug
Um eine Schießlösung zu erarbeiten, muss der Kapitän auch den Winkel am Bug für das Ziel kennen. Das ist nicht dasselbe wie die Zielpeilung, auch wenn man das aus manchen Filmen und Romanen vielleicht denkt. Die Zielpeilung gibt an, wo sich das Ziel im Verhältnis zum U-Boot befindet. Der Winkel am Bug gibt an, wo man sich vom Ziel aus gesehen befindet – was man natürlich nicht hofft.
In unserem Beispiel, in dem das Ziel von Osten nach Westen direkt über den Bug des U-Boots hinwegfährt, ist der Winkel am Bug Backbord 90°. Das heißt, die Backbordseite (links) des Ziels ist dem U-Boot zugewandt und steht in einem Winkel von 90° zum Kurs des U-Boots. Käme das Ziel direkt auf das U-Boot zu, wäre der Winkel am Bug gleich Null. Würde es sich direkt entfernen, wäre der Winkel am Bug 180°. Befände sich das Ziel auf einem südwestlichen Kurs, wäre der Winkel am Bug 45° nach Backbord usw.
Geschwindigkeit des Ziels
Der letzte benötigte Faktor ist die Geschwindigkeit des Ziels. Es gibt mehrere Methoden, diese zu ermitteln, obwohl keine wirklich 100%ig genau ist.
Erstens: Periskopbeobachtung. Die Periskop-Optik ist sowohl in der vertikalen als auch in der horizontalen Achse in Grad angegeben. Wenn die Entfernung zum Ziel bekannt ist, kann man die Geschwindigkeit bestimmen, indem man die Zeit misst, die das Schiff benötigt, um eine bestimmte Anzahl von Grad zurückzulegen. Das Problem bei dieser Methode ist natürlich, dass sie von einer genauen Entfernung abhängt, da man die Zeit misst, die das Ziel braucht, um eine bekannte Anzahl von Grad zu durchlaufen, und außerdem bedeutet sie, dass man das Periskop während der Messung offenlegt, was potenziell gefährlich ist, wenn der Feind es entdeckt. (Japanische Handelsschiffe führten nicht nur Deckgeschütze mit sich, häufig mit Geschützmannschaften, die tatsächlich wussten, was sie taten, sondern auch Wasserbomben, und zögerten nicht, sie einzusetzen.)
Zweitens: Allgemeinwissen. Einige Schiffstypen sind dafür bekannt, routinemäßig mit bestimmten Geschwindigkeiten zu fahren. Dies ist normalerweise die wirtschaftlichste Reisegeschwindigkeit. Da der Kapitän des Ziels aber vielleicht in Eile ist oder sich langsamer als gewöhnlich bewegt, ist dies in der Regel die ungenaueste Methode zur Bestimmung der Geschwindigkeit. Ein erfahrener Kapitän kann die Geschwindigkeit des Ziels oft recht genau anhand der Bugwelle abschätzen. (Die Tarnmuster der Kriegsschiffe sollen es dem Feind unter anderem erschweren, die Bugwelle deutlich zu sehen.)
Drittens: Zählen der Umdrehungen. Der Sonar-Operator kann auf das Geräusch der Schiffsschrauben des Ziels hören und die Anzahl der Umdrehungen pro Minute bestimmen. Wenn der Kapitän des U-Boots die Steigung (die Strecke, die bei einer Umdrehung zurückgelegt wird) der Propeller des Zielobjekts kennt, kann er eine ziemlich genaue Schätzung der Geschwindigkeit vornehmen. So sollte eine Schraube mit einer Steigung von 24 Fuß das Schiff bei jeder Umdrehung 24 Fuß vorwärts bewegen. Bei hundert Umdrehungen pro Minute sollte sich das Schiff also 2.400 Fuß bzw. 800 Yards vorwärts bewegen. Dies würde eine grobe Entfernung von 1 Seemeile (2.025 Yards) alle 2-1/2 Minuten oder eine Geschwindigkeit von etwa 23,7 Knoten ergeben. Eine solche Geschwindigkeit deutet im Allgemeinen auf ein großes Kriegsschiff oder ein Linienschiff hin. Frachtschiffe waren in der Regel langsamer, wobei die schnellsten im Allgemeinen auf etwa 16 Knoten begrenzt waren. (Treibstoffersparnis war der wichtigste Faktor – schnelle Schiffe verbrauchen viel Treibstoff, so dass hohe Geschwindigkeiten vor allem bei Passagierschiffen zu finden waren, bei denen die Reederei für eine schnelle Überfahrt einen Aufpreis verlangen konnte, bei Spezialfrachtern wie Bananenbooten, die ihre Ladung abliefern mussten, bevor sie verdarb, und bei Kriegsschiffen, bei denen die Kosten keine große Rolle spielten. Wenn die Schraubensteigung bekannt ist und eine genaue Zählung vorgenommen wurde, lässt sich die Geschwindigkeit in jedem Fall recht gut schätzen. Außerdem sind die Schrauben eines Schiffes weit davon entfernt, zu 100 % effizient zu sein – die einzigen Schiffe, die das schaffen, sind U-Boote in großer Tiefe, wo der große Seedruck Wirbelschleppen und Kavitation unterdrückt.)
Nachdem die Geschwindigkeit des Ziels bestimmt wurde, wird diese ebenfalls in den TDC eingegeben. An diesem Punkt warten alle einige Minuten und machen dann eine weitere Beobachtung. Wenn alle Daten korrekt waren, befindet sich das Ziel an der Stelle, die der Positionsgeber des TDC vorhersagt. Ist dies nicht der Fall, werden weitere Beobachtungen gemacht und Korrekturen in den TDC eingegeben. Mehrere Beobachtungen über einen Zeitraum von 10 bis 15 Minuten sollten den Fehler beseitigen – oder ihn zumindest so weit reduzieren, dass ein Treffer wahrscheinlicher ist als ein Fehlschuss.
Während der TDC diese Lösungen erarbeitet, werden die von ihm erzeugten Kreiselwinkel automatisch in die Torpedos einprogrammiert. Die gyroskopische Steuerung ermöglicht es, den Torpedo auf einen bestimmten Kurs einzustellen, anstatt das U-Boot auf den vom Kapitän gewünschten Zielpunkt auszurichten, wie es bei früheren Torpedokonstruktionen erforderlich war, die nur in einer geraden Linie fahren konnten.
Während all dies geschieht, wird auch die Torpedotiefe eingestellt. Für dieses spezielle Ziel, das einen geladenen Tiefgang von 38 Fuß hat, wird der Torpedo auf eine Tiefe von 25 Fuß eingestellt, so dass er weit unter der Wasserlinie explodieren wird. Wenn ein magnetischer Einflusszünder verwendet wird – was zu diesem späten Zeitpunkt des Zweiten Weltkriegs nicht mehr der Fall gewesen wäre, da zu diesem Zeitpunkt sogar das Bureau of Ordinance endgültig erkannt hatte, dass sie unter Feldbedingungen unzuverlässig waren – würde die Lauftiefe auf 43 Fuß eingestellt, so dass der Sprengkopf direkt unter dem Kiel explodieren würde, wo er den größten Schaden anrichten würde.
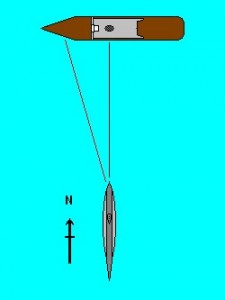 Diese Grafik zeigt das U-Boot und das Ziel zu dem Zeitpunkt, zu dem eine Lösung erarbeitet wurde und der Kapitän bereit ist, einen Torpedo abzufeuern. (In der Praxis würde er wahrscheinlich mindestens zwei abfeuern.) Das Ziel befindet sich jetzt genau vor dem U-Boot, in einer Entfernung von 1.400 Metern. Bei einer Geschwindigkeit von 46 Knoten braucht der Mark 14-Torpedo eine Minute, um diese Entfernung zurückzulegen. In dieser Minute hat sich das Schiff um eine Zehntelseemeile oder etwa 200 Meter vorwärts bewegt.
Diese Grafik zeigt das U-Boot und das Ziel zu dem Zeitpunkt, zu dem eine Lösung erarbeitet wurde und der Kapitän bereit ist, einen Torpedo abzufeuern. (In der Praxis würde er wahrscheinlich mindestens zwei abfeuern.) Das Ziel befindet sich jetzt genau vor dem U-Boot, in einer Entfernung von 1.400 Metern. Bei einer Geschwindigkeit von 46 Knoten braucht der Mark 14-Torpedo eine Minute, um diese Entfernung zurückzulegen. In dieser Minute hat sich das Schiff um eine Zehntelseemeile oder etwa 200 Meter vorwärts bewegt.
Mit anderen Worten, wenn der Torpedo geradeaus abgefeuert wird, ist das Ziel nicht mehr da, wenn der Torpedo ankommt, und der Torpedo geht achteraus. Die Berechnungen des TDC berücksichtigen dies und setzen den Torpedo auf einen relativen Kurs von 350°, d.h. der Torpedo bewegt sich in einem Winkel, so dass die relative Peilung zum Ziel konstant bleibt. Zwei Objekte, die in einer Kreuzungssituation eine konstante Peilung beibehalten, werden schließlich aufeinander treffen. Wenn der Torpedo das Ziel „anführt“, sollte er nahe der Mitte des Ziels treffen und eine gute Chance haben, es zu versenken.
Nach dem Abfeuern der Torpedos kann das U-Boot in der Nähe bleiben, um das Ergebnis zu beobachten. Oder, wenn das Ziel von Begleitschiffen begleitet wird, kann es ratsamer sein, zu versuchen, sich zu entfernen und auf Treffer mit den Hydrophonen zu lauschen. Letzteres hat den Nachteil, dass es schwierig ist, die Versenkung zu bestätigen, hat aber auch den Vorteil, dass es wahrscheinlicher ist, dass das U-Boot überlebt und die Lorbeeren erntet.